
Page 133 - 《应用声学》2023年第4期
P. 133
第 42 卷 第 4 期 谢志敏等: 采用被动声监测方法识别波弗特海区域海洋水声环境 795
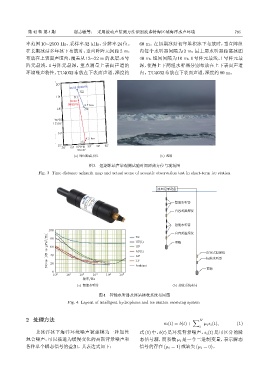
率范围 10∼2500 Hz,采样率 32 kHz,分辨率 24 位。 60 m。在短期冰站初年堆积冰下布放时,垂直阵组
在长期冰站多年冰下布放时,垂直阵阵元间距 2 m, 内每个水听器间隔为 2 m,最上层水听器距离冰面
布放在上表面声道内,覆盖从12∼22 m的水层,6号 40 m,组间间隔为 10 m,6 号阵元最浅、1 号阵元最
阵元最浅、1 号阵元最深,重点测量上表面声道的 深,使得上下两组水听器分别布放在上下表面声道
环境噪声特性,TC4032 布放在下表面声道,深度约 内。TC4032布放在下表面声道,深度约80 m。
20'
04:00 08/20/16
R2
19' R1
02:00
08/20/16 2.7 km
18' S2
76ON
17.00'
16'
6.2 km
S1
15' 39' 42' 45'
30' 33' 179OE
36.00'
(a) ᫎᡰሏவͯ (b) ဘڤ
图 3 短期冰站声学观测试验时间距离方位与现场图
Fig. 3 Time distance azimuth map and actual scene of acoustic observation test in short-term ice station
т᭧ᝮैܬ
అᑟඵզ٨
ᒭࠔरພງ́
అᑟඵզ٨
100 9 ᒭࠔरພງ́
Noise [dB re mPa 2 /Hz] 60 )' - ᧘ྭ ᒭࠔरພງ́
80
)'
"' -
40
"'
ಖюඵզ٨
-'
20
"NCJFOU
᧘ྭ
0
10 0 10 1 10 2 10 3 10 4 10 5
ᮠဋ/Hz
(a) అᑟඵզ٨ (b) ଌஆጇፒ࣋ࡍ
图 4 智能水听器及冰站接收系统布局图
Fig. 4 Layout of intelligent hydrophone and ice station receiving system
2 处理方法 ∑ N
m(t) = b(t) + µ i s i (t), (1)
i
北冰洋冰下海洋环境噪声被建模为一种加性 式 (1) 中,b(t) 是环境背景噪声,s i (t) 是可区分的瞬
混合噪声,可以描述为缓慢变化的高斯背景噪声和 态信号源,而系数 µ i 是一个二进制变量,表示瞬态
各种单个瞬态信号的叠加。其表达式如下: 信号的存在(µ i = 1)或缺失(µ i = 0)。