
Page 176 - 《应用声学》2025年第2期
P. 176
436 2025 年 3 月
成像过程将三维坐标投影到一个只有方位和 式 (2) 中,I T 1 (x) 和 I T 1 (x) 分别为 T 1 和 T 2 时刻的两
斜距组成的二维成像坐标系上,这个平面称为斜距 幅影像。
平面。目标P 的斜距R 0 与地距r 0 的映射关系为 接着对差值图像选择合适的阈值以突出变化
部分,同时抑制噪声,阈值化处理为
2
2
2
R = r + H , (1)
0 0
1, |D T 1 ,T 2 (x)| > T,
其中,H 为声呐基阵的距底高度。 B T 1 ,T 2 (x) = (3)
0, 其他,
受限于合成孔径技术自身特点,SAS 图像存在
几何形变和散斑噪声。受距离和照射角度的影响, 其中,B T 1 ,T 2 (x) 为差值图像二值化结果,T 为预先
测绘带内不同位置的地物后向散射强度也呈现有 选取的阈值。1代表变化像元,0代表非变化像元。
规律的变化 [12] 。此外,在实际应用中,一些难以控
2 基于双时相的水下变化目标检测方法
制的工程因素会导致声呐图像成像质量的下降,例
如基阵在航行中的姿态和运动状态等。这些现象都 水下声图通常采用图像预处理、图像分割、特
将不可避免地对声呐图像的正确判读和解译产生 征提取、目标分类识别的流程,实现对单帧或单幅
不利影响,如虚警目标的出现、目标横纵比例失真 声图的目标检测。另外由于海洋环境的复杂性和波
甚至弯曲、目标轮廓的模糊等。 动性,随着时间变化水下环境会产生较大的变化,因
1.2 变化检测技术 此有效利用时间信息能够在原有水下地貌和水下
目标分布基础上,直观了解水下环境和目标的变化
SAS 获取的声图中的像素和地理信息是一一
规律,高效检测定位可疑目标。
对应的关系,与遥感影像的图像结构类似,因此为了
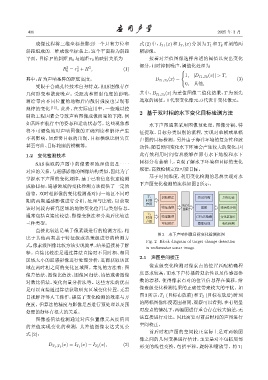
基于时间维度,利用变化检测的思想实现对水
掌握水下声图的变化规律,基于已有信息快速检测
下声图变化检测的流程如图2所示。
威胁目标,遥感领域的变化检测方法提供了一定的
借鉴。双时相影像的变化检测是对同一地区不同时
T பᡰᅿ ̝एکᛦ ࣀϙඋᣗ
期的两期遥感影像进行分析、处理与比较,以获取 ҉
ܦڏ ROI
该时间段内研究区域的地物变化位置与类别信息。 ྲढ़ᤥԩ ᤥԩ ฉ ᤌᤰভѬౢ
T
通常包括直接比较法、影像变换法和分类后比较法 ҉ ྲढ़ᦡю CFARೝ ԫӑӝಖฌ
三种类型。 ܦڏ ቇᫎಣ ڏϸܫေ ԫӑೝ
直接比较法是基于像素级进行的检测方法,相
图 2 水下声呐图像目标变化检测框图
比于其他两类基于特征级或决策级进行的检测方
Fig. 2 Block diagram of target change detection
式,像素级图像比较方法实现简单,结果直接易于解
in underwater sonar image
释。直接比较法是通过算法直接对不同时相、相同
2.1 声图空间校正
区域大小的遥感影像进行处理分析,进而获取该区
域在两时相之间的变化区域图。常见的方法有:图 像素级变化检测对像素点的位置匹配精确程
度要求较高,而水下声传播的复杂性以及传感器参
像差值法、图像比值法、图像回归法、均值或者图像
对数比值法、变化向量分析法等。这些方法的优点 数的漂移,使得像素点对的位置信息存在偏移,给
是可以直接通过算法获取研究区域变化位置,无需 像素级变化检测结果的正确性带来较大的干扰。如
图 3所示,T 1 (目标布放前)和T 2 (目标布放后)时刻
目视解译等人工操作,提高了变化检测的效率与方
的两幅图像纬度范围相同,观察可以看到,在有明显
便度。但算法的精度与影像是否进行预处理以及预
处理的好坏有很大的关系。 对应点的情况下,两幅图进行重合存在较大偏差,无
法直接进行对比。因此需要对前后时相的声图进行
图像差值法检测通过对应位置像元灰度值间
空间校正。
的差值实现变化的检测,其差值图像表达式见公
前后时相声图的空间校正实际上是对两帧图
式 (2):
像之间的几何变换进行估计,主要是对不包括局部
(x), (2)
D T 1 ,T 2 (x) = I T 1 (x) − I T 2
形变的线性变换,包括平移、旋转和缩放等。将 T 1