
Page 238 - 《应用声学》2025年第2期
P. 238
498 2025 年 3 月
R-CNN deep learning network, the average accuracy has increased to 95.3% after the use of optimization
measures such as deep residual network, feature pyramid network, and region consistency pooling, and the
model’s accuracy in identifying defect images has been effectively improved. The improved Faster R-CNN
target recognition algorithm overcomes the problem of manual recognition and classification of phased array
defect images and has good engineering application value.
Keywords: Ultrasonic phased array testing; Improved Faster R-CNN; Intelligent defect recognition
匣内部缺陷的超声相控阵检测图像特征,以 Faster
0 引言
R-CNN 为原型,通过使用 ResNet50 作为特征提取
大型铸造不锈钢机匣具有结构复杂、体积大、 网络、添加FPN结构、替换Faster R-CNN算法中的
组织不致密、材料晶粒不均等特点,在制造过程时, 感兴趣区域池化 (Region of interest pooling, ROI
容易产生缩孔、夹渣、疏松、裂纹等缺陷。为避免由 Pooling) 对其进行优化,提升了目标检测网络对于
缺陷引起的机器故障和事故,在生产和服役过程中 机匣内部缺陷的识别精度,实现了大型铸造不锈钢
需要对其进行无损检测 [1] 。相比传统超声检测,超 机匣内部缺陷的超声相控阵检测及其智能识别。
声相控阵检测技术具有声束灵活可调、灵敏度高、
1 检测方法与检测图像分析
速度快、可靠性高等优势。同时,该技术可灵活控
制声束偏转与聚焦,使其在大型铸造不锈钢机匣检
1.1 检测对象
测过程中具有显著的优越性 [2] 。然而,相控阵检测
检测对象为大型铸造不锈钢机匣,其材质为马
图像中显示的缺陷类型仍需检测人员判读,存在主
氏体不锈钢 (ZG1CR17NI3),机匣由内外环组成,纵
观性强、易误判、效率低、可靠性不足等问题。随
波声速为 5820 m/s,弹性模量为 200 GPa,密度为
着深度学习技术的迅速发展,相比传统的图像检测
7700 kg/m ,泊松比为0.3。对机匣进行全面超声相
3
方法,基于深度学习的目标检测方法具有更好的识
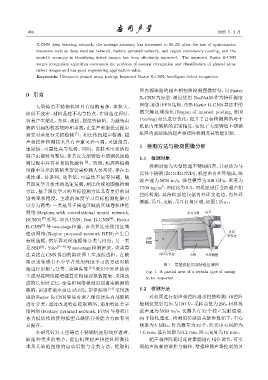
控阵检测,其待检部位包括内外环安装边、内外环
别效率和精度。主流的深度学习目标检测框架可
侧壁、吊耳、支板、吊耳R角区域,如图1所示。
以分为两类:一类是基于候选区域的区域卷积神经
网络 (Regions with convolutional neural network, ՎRᝈ Վ
RCNN) [3] 系列,如 R-CNN、Fast R-CNN 、Faster
[4]
R-CNN [5] 等 two-stage 框架,该类算法先使用区域
ܱဗ
建议网络 (Region proposal network RPN) 产生目 ߷ᜉ
标候选框,然后再对候选框做分类与回归;另一类 Яဗ
Οܞ
[6]
是 SSD 、Yolo [7−9] 等 one-stage 检测框架,该类算
法直接在 CNN 得到的特征图上生成候选框。在缺 Яဗ߷ᜉ ஃ ܱဗΟܞ
陷识别领域有不少学者采用深度学习的方法对缺
图 1 某型机匣局部待检区域图
陷进行识别与分类。余泽禹等 [10] 采用全矩阵捕获
Fig. 1 A partial area of a certain type of casing
生成对抗网络据增强算法构建虚拟数据集,采用改 to be inspected
进的长短时记忆 -全卷积网络模型识别真实检测的
缺陷,识别准确率高达 95.6%。彭伊娟等 [11] 采用改 1.2 检测方法
进的 Faster R-CNN 算法对聚乙烯管接头内部缺陷 对机匣进行超声相控阵扇形扫描检测,相控阵
进行分类,通过改进特征提取网络、添加特征金字 检测仪发射电压为 100 V,采样点数为 256,材料纵
塔网络 (Feature pyramid network, FPN) 与卷积注 波声速为 5820 m/s,仪器具有 32 个独立发射通道、
意力模块结构使得模型在缺陷分类能力方面有明 64 个接收通道。检测用传感器关键参数如下:中心
显提升。 频率为 5 MHz,阵元数量为 32 个,阵元中心间距为
本研究针对大型铸造不锈钢机匣射线穿透难、 1.0 mm,晶片间隙为0.2 mm,阵元宽度为10 mm。
缺陷种类多的特点,提出机匣超声相控阵检测技 超声相控阵通过延时激励进行相位调节,可实
术及其缺陷图像的自动识别与分类方法。提取机 现超声波束的聚焦与偏转,增强检测声场控制的灵