
Page 144 - 《应用声学》2020年第5期
P. 144
786 2020 年 9 月
中含有半径为 R 0 的空化核时,采用公式 (8) 计算磁 表 1 多孔介质参数
流变抛光液中的空化阈值: Table 1 Parameters of porous media
v
u ( ) 3
2 u 2σ/R 0 材料 体积分数 体积模量/Pa 密度/(g·cm −3 )
P B = p 0 − p v + √ t ( ), (8)
3 3 p 0 − p v + 2σ/R 0
羟基铁粉 0.29 2.22 × 10 11 7.86
其中,R 0 为空化泡的初始半径 (µm),p 0 为液体的静 绿碳化硅 0.09 2.09 × 10 11 3.2
压力 (Pa),p v 为气泡内的蒸汽压 (Pa),σ 为液体的
纳米二氧化硅 0.016 0.369 × 10 11 2.648
表面张力系数(N/m),2σ/R 0 为空化泡的表面张力。
20 C 时,水的液体静压 p 0 = 0.1 MPa,饱 图 2 为超声振动系统网格划分。网格采用自由
◦
和蒸汽压 p v = 2.3388 kPa,表面张力系数 σ = 四面体网格,网格大小为细化。为了保证计算精
0.7275 N/m,假设空化气泡初始半径 R 0 = 5 µm, 度,磁流变抛光液所在区域的网格需保证一个波
因此,20 C时水的空化阈值P B = 0.103 MPa。 长内至少有 5 个网格,即网格最大单元的大小为
◦
14.81 mm。
1.3 边界条件与网格划分
400
图 1(a) 为超声振动系统的几何结构图, 换
能器由 4 层压电陶瓷片堆叠而成。图 1(b) 为容器
300
边界条件设置。边界 1 为变幅杆与抛光液接触
面,设为声结构耦合边界。考虑声传播的吸收
mm 200
和反射将容器壁面 3 与壁面 4 设置为阻抗边界。
3
Z = ρc = 2500 (kg/m ) × 5639 (m/s)。抛光液
100
与空气接触,声波发生全反射,边界 2 设置为软声
场边界。超声功率 700 W 时,根据压电陶瓷片的极
0
化方向,压电陶瓷片的一端加 2187 V 激励电压,另
一端边界设为接地。磁流变抛光液是由固体颗粒与
-40 0 40
液体介质组成的悬浮体系。采用多孔介质 wood 模
型模拟悬浮在液体中的固体夹杂物或流体混合物, 图 2 模型网格划分
具体参数如表 1 所示。容器半径 r = 45 mm,高度 Fig. 2 Meshing model of compute area
H 2 = 90 mm,变幅杆探入深度设为H 1 。
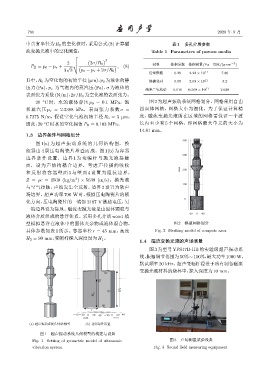
1.4 磁流变抛光液的声场测量
图 3 为型号 YPS17B-HB 的实验级超声振动系
统,振幅调节范围为50% ∼ 100%,最大功率1000 W,
默认频率20 kHz。超声变幅杆浸没于盛有制备磁流
变抛光液材料的烧杯中,探入深度为10 mm。
Ł
ŀ
ł H
H
Ń
r
-40-20 0 20 40 -20 0 20 40
mm mm
(a) ᡔܦүጇፒї͵ፇڏ (b) ႍ͈Ꮆ
图 1 超声振动系统几何模型的构建与设置
Fig. 1 Setting of geometric model of ultrasonic 图 3 声场测量试验设备
vibration system Fig. 3 Sound field measuring equipment