
Page 137 - 《应用声学》2021年第1期
P. 137
第 40 卷 第 1 期 李悦等: 非高斯环境下的深度学习脉冲信号去噪与重构 133
^
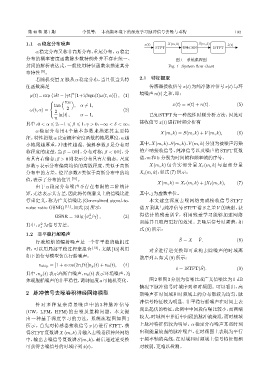
1.1 α稳定分布噪声 x↼t↽ X↼m֒k↽ S↼m֒k↽ ^ s↼t↽
STFT ԝ٪CNN ISTFT
α 稳定分布又称非高斯分布、重尾分布。α 稳定
分布的概率密度函数除少数特例外并不存在统一、 图 1 系统流程图
封闭的解析表达式,一般使用特征函数来描述其分 Fig. 1 System flow chart
布特性 [9] 。
若随机变量 X 服从 α 稳定分布,当且仅当其特 2.1 特征提取
征函数满足 传感器接收信号x(t)为纯净脉冲信号s(t)与环
α
φ(t)=exp {iδt − |γt| [1+iβsgn(t)ω(t, α)]} , (1) 境噪声n(t)之和,即:
( πα )
tan , α ̸= 1, x(t) = s(t) + n(t). (5)
ω(t, α) = 2 (2)
2
lg |t| , α = 1, 已知 STFT 为一种线性时频分析方法,因此对
π
其中,0 < α 6 2,−1 6 β 6 1,γ > 0,−∞ < δ < ∞。 接收信号x(t)进行时频分析有
α 稳定分布用 4 个基本参数来描述其主要特
X(m, k) = S(m, k) + V (m, k), (6)
征。特性指数α 决定概率密度函数的拖尾厚度,α越
小拖尾越厚重,冲击性越强。偏斜参数 β 是分布对 其中,X(m, k)、S(m, k)、V (m, k)分别为被噪声污染
称程度的度量,当 β = 0 时,分布对称;β < 0 时,分 的声呐接收信号、纯净信号以及噪声的 STFT 复数
布具有右偏态;β > 0则表示分布具有左偏态。尺度 谱,m和k 分别为时间帧和频率帧的序号。
参数 γ 表示分布偏离均值的离散程度,类似于高斯 X(m, k) 包含实部分量 X r (m, k) 与虚部分量
分布中的方差。位置参数 δ 类似于高斯分布中的均 X i (m, k),如式(7)所示:
值,表示了分布的位置 [10] 。
X(m, k) = X r (m, k) + jX i (m, k), (7)
由于 α 稳定分布噪声不存在有限的二阶统计
矩,无法表示其方差,因此将传统意义上的信噪比进 其中,j为虚数单位。
行重定义,称为广义信噪比 (Generalized signal-to- 本文建立深度去噪网络完成接收信号 STFT
noise ratio GSNR) [11] ,如式(3)所示: 谱 X 到其与纯净信号 STFT 谱 S 之差 V 的映射,获
ˆ
( 2 ) 得估计的残差谱 V ,利用残差学习能够加速网络
GSNR = 10 lg σ /γ , (3)
s
训练并且取得更好的效果。去噪后信号时频谱,如
其中,σ 为信号方差。
2
s
式 (8)所示:
1.2 非平稳行船噪声
ˆ
ˆ
行驶船舶的辐射噪声是一个非平稳的随机过 S = X − V . (8)
程,可以用局部平稳过程来拟合 [12] ,文献 [13] 利用 对 S 进行逆变换即可重构去除噪声的时域离
ˆ
如下的信号模型仿真行船噪声: 散序列 ˆs,如式(9)所示:
n ship = [1 + a cos(2πft)]n g (t) + n 0 (t), (4)
ˆ
ˆ s = ISTFT(S). (9)
其中,n g (t)表示高斯白噪声,n 0 (t)表示环境噪声,为
体现舰船噪声的非平稳性,调制幅度a可随机变化。 图2 和图 3分别为信噪比或广义信噪比为0 dB
情况下脉冲信号时域序列和时频图。可以看出,高
2 脉冲信号去噪卷积神经网络模型 斯噪声在时间域和时频域上的分布都较为均匀,脉
冲信号特征较为明显。非平稳行船噪声在时间上表
针对多种复杂背景噪声中的 3 种脉冲信号
现出起伏的特征,此例中中间段信噪比较小,而两端
(CW,LFM,HFM) 的去噪及重构问题,本文提
较大,时域图中靠近中间段的脉冲被淹没,而时频域
出一种基于深度学习的方法,系统流程图如图 1
所示。首先对传感器接收信号 x (t) 进行 STFT,获 上脉冲特征仍较为明显。α 稳定分布噪声某些时刻
得STFT复数谱X (m, k)并输入去噪卷积神经网络 出现能量较强的脉冲噪声,在时频图上表现为平行
中,输出去噪信号复数谱 S(m, k),最后通过逆变换 于频率轴的亮线,在时域和时频域上信号特征都相
可获得去噪信号的时域序列 ˆs(t)。 对较弱,更难以检测。