
Page 230 - 《应用声学》2023年第2期
P. 230
418 2023 年 3 月
XbX1 = XbY 1 − XbX2,
XbX2 = XbX1 − XbY 2,
(2)
XbY 1 = XbY 1 − XbX1,
XbY 2 = XbX2 − XbY 2,
Y 以及
X X
Y
Ԧ࠱᭧
Y bX1 = Y bY 1 − Y bX2,
ࠕᮠଌஆ٨ѵ Y bX2 = Y bX1 − Y bY 2,
(3)
Y bY 1 = Y bY 1 − Y bX1,
Y bY 2 = Y bX2 − Y bY 2.
Xb Yb TD2 1.2 方位识别与确定
Xb
Yb
在以上介绍的错位双偶极声源进行远探测的
测量原理基础上,提出了新型方位偶极声波仪器探
ࠕᮠϦౝԧ࠱٨
测地质体真实方位的步骤如下:
Ya
Xa Xa 步骤 1:对偶极声源 a 对应的信号采用公式 (1)
Ya TD1 计算获得四分量波形,采用传统偶极远探测方法
获得地质体 0 ∼ 360 方位成像结果,结果中存在
◦
◦
ࠕᮠϦౝԧ࠱٨1
180 方位不确定性,对需要确定真实方位的地质体
◦
先选出2个角度;
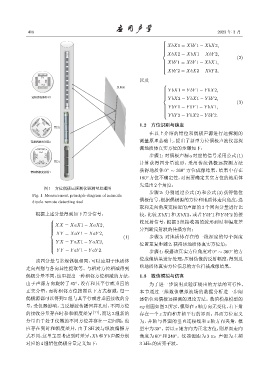
图 1 方位偶极远探测仪器测量原理图
步骤 2:分别通过公式 (2) 和公式 (3) 获得错位
Fig. 1 Measurement principle diagram of azimuth
偶极信号,根据偶极源的方位和地质体走向角度,选
dipole remote detecting tool
取和走向角度更接近的声源的 2个同向分量进行比
根据上述分量得到如下差分信号: 较,比较 XbX1 和 XbX2,或者 Y bY 1 和 Y bY 2 的接
收反射信号,根据 2 组接收器的波形到时和幅度差
XX = XaX1 − XaX2,
异判断反射波的传播方向;
XY = XaY 1 − XaY 2,
(1) 步骤 3:对地质体存在的一段深度的每个深度
Y X = Y aX1 − Y aX2,
位置重复步骤2,获得该地质体真实方位角;
Y Y = Y aY 1 − Y aY 2. 步骤 4:根据该真实方位角度对 0 ∼ 360 的方
◦
◦
位成像结果进行处理,压制伪像的反射幅度,得到反
该四分量与常规偶极相同,可以应用于地质体
映地质体真实方位信息的方位扫描成像结果。
走向判别与各向异性提取等。与相对方位相减得到
偶极分量不同,这里提出一种相邻方位相减的方法, 1.3 数值模拟与仿真
由于声源方向旋转了 45 ,没有和其平行或垂直的 为了进一步说明及验证提出的方法的可行性,
◦
正交分量,而将相邻方位按照以下方式相减,每一 本节通过三维数值模拟波场的数据分析进一步阐
偶极源都可以得到2 组与其平行或者垂直接收的分 述错位双偶极远探测的理论方法。数值模拟模型的
量,受仪器影响,当反射波传播回井孔时,不同方位 xy 剖面如图2 所示,模型在 z 轴方向无变化,右下角
的接收分量存在时移和幅度差异 [11] ,而这 2 组新的 存在一个 z 方向和井轴平行的界面。界面方位定义
分量由于处于仪器的不同方位并存在一定间隔,也 为,井轴与界面的垂直连接线和 x 轴方向夹角,模
应存在到时和幅度差异,由于 SH 波与纵波偏振方 型中为 30 。若以 x轴方向为正北方位,则界面走向
◦
式不同,这里主要考虑到时差异,Xb和Y b声源分别 角度为 60 和 240 。仪器源距为 3 m,声源为主频
◦
◦
对应的4组错位偶极分量定义如下: 3 kHz的雷克子波。