
Page 225 - 《应用声学》2023年第3期
P. 225
第 42 卷 第 3 期 张书文等: 呼吸声分类技术研究及检测系统设计 663
式对于样本特征数过多时时间耗费较大,因此只适
ऀѵ
合样本较少的简单模型中。
第二种 KD树实现原理并不是直接对样本进行
ऀѵ
测试与分类,而是先对训练集建模,建立的模型就是
ᫎ t KD 模型,然后在对数据进行预测。图6 为 KD 树的
图 5 声音信号的 DTW 处理 计算流程图,KD 数采用的是从样本的 N 为特征数
量中取方差最大的第 k 个特征值作为根节点,然后
Fig. 5 DTW processing of sound signal
根据此根节点,将数据按大于还是小于划分为左右
假设匹配A(a 1 , a 2 , a 3 , · · · , a i , · · · , a n )和 B(b 1 ,
子树,最后通过同样的办法递归形成KD树。
b 2 , b 3 , · · · , b j , · · · , b m )两个序列的相似性,为了对齐
两个序列,需要构造一个矩阵网格 C,该网格由矩 ྲढ़ག
features Kn < nT Ѭҟ Kn ĺ nT
阵元素 C(i, j) 构成,C(i, j) 表示序列 a j 与 b j 的欧
氏距离,该网格中存在一个最短路径使得距离累加
值 Dist 最小。该累加值也就是两个声音序列的相 ࡙नKDಞ ࢻߕಞྲढ़ Կߕಞྲढ़
ག
ག
似值。
{ ࡙नࢻߕಞ
Dist = d(q i , c j ) + min Dist(i − 1, j − 1), ᤥહతܸவࣀ ࡙नࢻߕಞ
፥n
}
Dist(i − 1, j), Dist(i, j − 1) . (6)
ᤥહతܸவࣀ፥n
经过 DTW处理之后的时间片段可以减少因呼 ᄊ˗ϙͻ˞ϙnT
吸速率及发音震动缓急产生的特征值误差。通过
将不同语声以及自身的MFCC特征序列进行DTW
图 6 KD 树计算流程图
处理可以得到 DTW 矩阵 (欧几里得相似距离矩阵)
Fig. 6 KD tree calculation flowchart
和相似值 (距离)。由 DTW 矩阵得到的相似值可以
表明不同语声信号的相似性,所以该矩阵可以作 2 系统设计
为 K 最临近 (K-nearest-neighbor, KNN) 划分样本
空间的依据。 传统声频采集装置对微弱的体声信号采集达
不到要求,其采集效果往往不是很理想。而本文提
1.5 KNN算法分类
出的使用 PVDF 薄膜传感器来采集呼吸声信号的
采集的呼吸声音进行 Mel 倒谱系数的计算提
检测系统采集声频信号分辨率高,可以检测到低频
取之后,需要使用某种方式对呼吸声音进行分类。
小信号。
由于异常呼吸声音的样本采集较为困难,不能提取
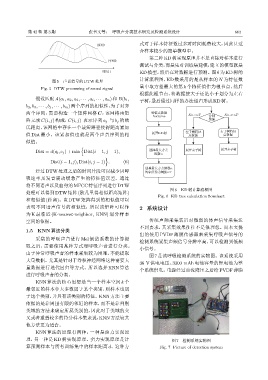
图 7 是该呼吸检测系统的实物图。该系统采用
大量数据。尤其是针对于卷积神经网络这种需要大
36 V 供电电压、3300 mAh 电池容量的锂电池为整
量数据进行迭代回归等方式。所以选择 KNN 算法
个系统供电。电源经过直流降压之后给PVDF薄膜
进行呼吸声音的分类。
KNN 算法的核心思想是当一个样本空间 k 个
最邻近的样本中大多数属于某个类别,则样本也属
于这个类别,并具有该类别的特征。KNN 方法主要
依据的是靠周围有限的邻近的样本,而不是靠判别
类域的方法来确定所属类别的,因此对于类域的交
叉或者重叠较多的待分样本集来说,KNN方法较其
他方法更为适合。
KNN 算法的原理有两种,一种是蛮力实现原
理,另一种是 KD 树实现原理。蛮力实现原理是计 图 7 检测系统实物图
算预测样本与所有训练集中的样本距离 d。这种方 Fig. 7 Picture of detection system