
Page 65 - 《应用声学》2023年第3期
P. 65
第 42 卷 第 3 期 卢俊强等: 方位远探测声波测井仪数据采集控制软件设计 503
仪器电子系统设计了一主 (节点) 多从 (节点) 通信正确建立后即可下发,仪器接口电路解码后发
的连接控制方式,主要由主控电路 (主节点)、多节 送到仪器电路各个功能模块,建立仪器的初始工作
点采集电路(采集从节点)、相控激励电路(激励从节 参数。数据缓冲区用以存放井下仪器上传的各类
点) 构成。地面采集控制软件通过下发命令方式对 数据。波形显示占用较多系统资源,但其对实时性
仪器工作过程进行控制,并接收仪器上传的采集数 要求较低,为了保证测井采集处理的实时运行和仪
据和状态信息。仪器与地面采集控制软件的数据交 器组件工作的可靠性,将波形显示在一个辅助工作
互由主节点完成,在地面采集控制软件的命令驱动 线程中实现,辅助线程与主线程之间的通信由事件
下主节点主要实现换能器激励、信号接收放大、模 驱动。
式组合选择、有源滤波、数据采集和数据通讯等控
制功能。 नݽ
方位远探测声波测井仪数据采集控制软件由
ԩ४́٨ጸ͈ࢺͻᄬै
仪器初始化、数据采集、数据分析及处理、仪器参数
设置、下发命令封装、文件操作、实时波形绘图显 Ꮆ́٨ڡڧ֗̔૱᫂ए
示、实时波形处理、数据回放、帮助系统等部分组成。
图 2为采集控制软件的功能模块构成框图。 ឴ԩѺݽӑԠ
́٨ጸ͈ ᎶѺݽӑCANଌ֑̾ࣳʾԧ
Ꮆ́٨Ѻݽӑ֑̾
́ ́ ฉ ࠄ ښ
٨ ٨ ͈ ॎ ጳ
Ѻ ᧔ Ѭ Ԡ ୲ ፋ ฉ ࣟ Ꮆᎁфӝ ѺݽӑᄱТԫ᧚
ݽ ᬷ ౢ ͻ ڏ ॎ Ұ
ӑ ԣ ௭ ܫ
ܫ Ꮆ ᇨ ေ ѹथฉॎ௭ᇨጳሮ ܭͯጳሮᤰη͈̃
ေ
图 2 仪器采集控制软件功能构成框图 ፇౌ
Fig. 2 Functional block diagram of tool acquisi-
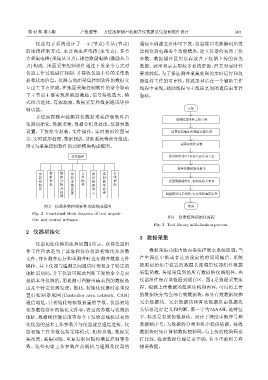
图 3 仪器组件初始化流程
tion and control software
Fig. 3 Tool library initialization process
2 仪器初始化
3 数据采集
仪器初始化模块流程如图 3 所示。获得仪器组
件工作目录是为了读取和保存仪器初始化及参数 数据采集功能由地面采集控制主系统回调,当
文件,并在测井运行和重测井时进行测井数据文件 产生深度中断或者达到设定的时间间隔后,系统
操作。井下仪器与遥测之间通信时都包含了特定的 按照初始化中设置的数据长度调用仪器组件数据
地址识别码,井下仪器可据此判断下发的命令是否 采集函数,传递采集到的所有数据给仪器组件,由
是给本身仪器的,而遥测可判断出请求到的数据是 仪器组件保存该数据到缓存区。图 4 是数据采集流
由某个特定仪器发送。因此,初始化仪器时必须设 程。根据上传数据的组织结构和内容,可以将上传
置好控制器域网 (Controller area network, CAN) 的数据块分为全部有效数据块、部分有效数据块和
通信地址,并初始化每帧数据量的字数。仪器初始 冗余数据块。冗余数据块和有效数据块由数据块
化参数保存在初始化文件中,将这些参数与仪器的 头信息进行定义和判断,第一字为 55AAH,是特征
地址、数据帧传输长度等命令下发给前端机以初始 字,标志是有效的数据块。设计了深度中断序号和
化仪器的基本工作参数并与仪器建立通信连接。仪 数据帧序号,为数据的分类和排序提供依据。接收
器初始工作参数包括采集模式、相控参数、数据采 数据块时先计算帧数据校验码,与上传的校验码进
集深度、采集间隔、重复发射间隔和增益控制等参 行比较,检查数据传输是否正确,若不正确则丢弃
数。这些初始工作参数在前端机与遥测及仪器的 错误数据。