
Page 174 - 《应用声学》2023年第6期
P. 174
1284 2023 年 11 月
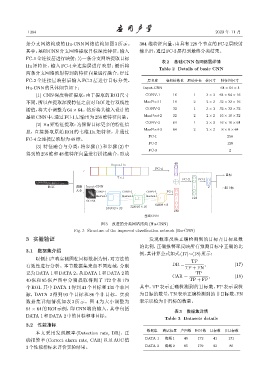
条分支网络构成的 Hu-CNN 网络结构如图 3 所示。 304 维特征向量,由具有 128 个节点的 FC-2 层映射
其中,基础 CNN 分支网络提取目标深度特征,输入 输出后,通过FC-3层得到最终分类结果。
FC-1全连接层进行映射;另一条分支网络提取目标
表 2 基础 CNN 各网络层详情
Hu 矩特征,输入 FC-4 全连接层进行映射;最后将
Table 2 Details of basic CNN
两条分支网络映射得到的特征向量进行融合,经过
FC-2 全连接层映射后输入 FC-3 层进行目标分类。 层名称 卷积核数量 滑动步长 核尺寸 特征图尺寸
Hu-CNN的具体细节如下: Input-CNN 64 × 64 × 1
(1) CNN 深度特征提取:由于提取的 ROI尺寸 CONV-1 16 1 3 × 3 64 × 64 × 16
不同,所以在提取深度特征之前对 ROI进行双线性 MaxPool-1 16 2 2 × 2 32 × 32 × 16
插值,将大小调整为 64 × 64。然后将其输入设计的 CONV-2 32 1 3 × 3 32 × 32 × 32
基础CNN中,通过FC-1层输出为256维特征向量。 MaxPool-2 32 2 2 × 2 16 × 16 × 32
(2) Hu 矩特征提取:为保留目标更多的特征信 CONV-3 64 1 3 × 3 16 × 16 × 64
MaxPool-3 64 2 2 × 2 8 × 8 × 64
息,直接提取原始 ROI 的七维 Hu 矩特征,并通过
FC-1 256
FC-4全连接层映射为48维。
FC-2 128
(3) 特征融合与分类:将步骤 (1) 和步骤 (2) 中
FC-3 2
得到的 256 维和 48 维特征向量进行拼接融合,形成
48
Input-Hu
FC-4
ᄬಖ
7T1
FC-2 FC-3
ROI ូட Input-CNN 2 ᭤ᄬಖ
ܸ࠵ CONV-1 CONV-2 CONV-3 FC-1
MaxPool-1 MaxPool-2 MaxPool-3
128
64T64
64@8T8
32@16T16
16@32T32
256
۳ᆩCNN
图 3 改进的分类网络结构 (Hu-CNN)
Fig. 3 Structure of the improved classification network (Hu-CNN)
3 实验验证 发现概率反映正确检测到的目标占目标总数
的比例,正确报警率反映所有预测目标中正确的比
3.1 数据集介绍
例,其计算公式如式(17)∼(18)所示:
以侧扫声呐实测圆柱目标数据为例,对方法的 TP
有效性进行分析。本节数据集来自不同海域,分别 DR = TP + FN , (17)
记为DATA 1和DATA 2。从DATA 1和DATA 2的 TP
CAR = , (18)
40 张和 85 张声图中分别提取得到了 172 个和 179 TP + FP
个 ROI,其中 DATA 1 得到 41 个目标和 131 个非目 其中,TP 表示正确检测到的目标数,FP 表示误检
标,DATA 2 得到 93 个目标和 86 个非目标。实验 为目标的数量,TN表示正确检测到的非目标数,FN
数据集详细情况如表 3 所示。图 4 为大小调整为 表示误检为非目标的数量。
64 × 64 的 ROI 示例,即 CNN 端的输入,其中包括
表 3 数据集详情
DATA 1 和DATA 2 中的目标和非目标。
Table 3 Datasets details
3.2 性能指标
数据集 海试位置 声图数 ROI 数 目标数 非目标数
本文采用发现概率 (Detection rate, DR)、正
确报警率 (Correct alarm rate, CAR) 以及 AUC 值 DATA 1 海域 1 40 172 41 131
3个性能指标来评价实验结果。 DATA 2 海域 2 85 179 93 86