
Page 166 - 《应用声学》2024年第1期
P. 166
162 2024 年 1 月
在由 B 扫描或 C 扫描获得超声图像时,必须保
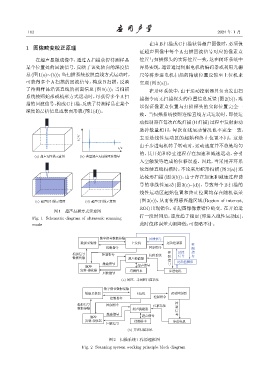
1 图像畸变校正原理
证超声图像中每个 A 扫描回波信号对应的像素点
在超声显微成像中,通过 A 扫描获得待测样品 位置与扫描探头的实际位置一致,这在闭环系统中
某个位置处的回波信号,反映了该处轴向的深度信 容易实现,通常通过伺服电机的编码器或利用光栅
息(图1(a)∼(b));当扫描系统按照直线方式运动时, 尺等将步进电机扫描的精确位置反馈至上位机来
可获得多个 A 扫描的回波信号,构成 B 扫描,反映 实现(图2(a))。
了待测样品沿该直线的剖面信息 (图 1(c));当扫描 在开环系统中,由于运动控制器只负责发出扫
系统按照蛇形或梳形方式运动时,可获得多个 A 扫
描指令而无扫描探头的位置信息反馈 (图 2(b)),难
描的回波信号,构成C扫描,反映了待测样品在某个
以保证像素点位置与扫描探头的实际位置完全一
深度的层析信息或表面形貌(图1(d))。
致。当扫描系统按照连续直线方式运动时,即使运
动控制器在每次直线扫描(B扫描)过程中发射驱动
脉冲数量相同,每次直线运动情况也不完全一致,
V/V 主要是线性运动区的起始和终止位置不同。这是
由于步进电机转子转动时,运动速度并不总是均匀
t/s
的,其开始和停止过程存在加速和减速运动,会引
(a) ᡔܦAੳଡᇨਓڏ (b) ЧیᡔܦAੳଡڀฉηՂ
入空触发等造成的位移误差。因此,当采用开环系
统连续直线扫描时,不论采用蛇形扫描 (图 3(a)) 还
是梳形扫描 (图 3(b)),由于存在加速和减速过程诱
导的非线性运动 (图 3(c)~(d)),导致每个 B 扫描的
线性运动区起始位置和终止位置均存在随机误差
(c) ᡔܦBੳଡᇨਓڏ (d) ᡔܦCੳଡᇨਓڏ (图 3(e)),从而使得感兴趣区域 (Region of interest,
ROI)出现错位,引起图像像素错位畸变。在开始运
图 1 超声扫描方式示意图
行一段时间后,速度趋于稳定 (即进入线性运动区),
Fig. 1 Schematic diagram of ultrasonic scanning
mode 此时位移误差大幅降低,可忽略不计。
ߚηՂ͜ᣥ ԦᯠηՂ
᧔ᬷ٨ ʽͯ ᤂү҄٨
҄ૉ̾ ҄ૉ̾ ҄
വલηՂ ҄ૉ̾ ͯረጇፒ Ԧᯠ ૉ
ηՂ
͜ᣥ ᡔܦ૱ᑟ٨ ҄ ̾
η ᤂүᄣ٨
༏ҵηՂ Ղ
ᑢф ᡔܦηՂ
ԧ࠱-ଌஆ٨ ॠನవ ൦ᤉႃ
ڀฉηՂ
(a) ᫇ဗnjӧ᫇ဗੳଡጇፒ
ߚηՂ͜ᣥ
᧔ᬷ٨ ʽͯ ᤂү҄٨
҄ૉ̾ ҄ૉ̾
വલηՂ ҄ૉ̾ ͯረጇፒ
͜ᣥ ᡔܦ૱ᑟ٨ ҄
η
༏ҵηՂ Ղ
ᑢф ᡔܦηՂ
ԧ࠱-ଌஆ٨ ॠನవ ൦ᤉႃ
ڀฉηՂ
(b) नဗੳଡጇፒ
图 2 扫描系统工作原理框图
Fig. 2 Scanning system working principle block diagram