
Page 243 - 《应用声学》2024年第6期
P. 243
第 43 卷 第 6 期 张冰等: 复合材料结构损伤声发射检测的信息扩充方法 1419
结果的变化。从图中可以看出,由于镜像传感阵元 表 1 不同阵列形式下所有冲击点的定位误差
的加入,原来无法定位的双传感阵列,经过信息挖掘 Table 1 Localization error of all impact
补充后扩充为三阵元阵列,实现了较精确的冲击定 points under different array forms
位。另外由于镜像传感器实际上改变了原有的传感 平均定位 均方根定位 标准差定位
阵列形式
阵元阵列的布局,因此在对角特殊点上的定位误差 误差/cm 误差/cm 误差/cm
S14 1.47 2.47 2.05
有所改善。
S123 1.86 2.88 2.27
综上,该边界信息挖掘补充方案利用提取的混 S234 1.82 3.09 2.58
响反射信息,在传感阵元数量少于常规定位阵列的 S124 1.93 3.19 2.62
情况下完成了损伤定位,对传感器失效的问题进行 S134 1.63 3.07 2.68
S1234 1.06 1.43 1.00
了一定程度补救,并且最终的定位结果较准确。
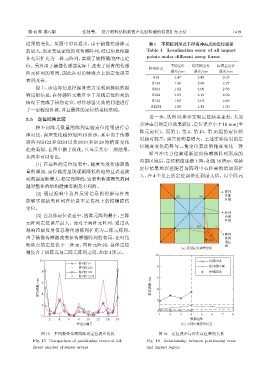
进一步,从图 15 所示实验定位结果来看,大部
3.5 定位结果比较
分冲击点的定位效果较好,定位误差小于10 mm(全
将不同阵元数量的阵列实验定位结果进行总
阵元定位)。而第 1、第 4、第 13、第 16 组的定位结
体对比,误差变化趋势如图 15 所示,其中由于传感
果相对较差,误差值明显增大。上述实验结果的定
器阵列 S123 和 S234 以及 S124 和 S134 的精度变化
位精度变化趋势与三角定位算法的精度变化一致
趋势类似,在图中做了简化,只显示其中一组结果。
——即当冲击点位置逐渐远离传感器阵列形成的
从图中可以看出:
内部区域后,定位精度逐渐下降,如图 16所示,实验
(1) 在最终的定位结果中,随着失效传感器数
定位结果的误差随着与阵列中心距离的增加而扩
量的增加,定位精度呈现逐渐降低的趋势且误差波
大,在 4 个角上的定位误差达到最大值。以全阵元
动范围逐渐增大,稳定性降低,这表明传感器失效问
题对整体的结构健康监测是不利的。
(2) 通过混响中边界反射信息的挖掘与补充 ѵ
S3 S4 ܱᦊ
能够实现缺失阵列在信息不足情况下的精确损伤 ӝ۫
定位。
ѵ
(3) 在总体定位误差中,四阵元阵列最小,三阵 Яᦊ
ӝ۫
元阵列定位误差最大。而对于两阵元阵列,通过从
S2
混响挖掘反射信息将传感阵列扩充为三阵元阵列, S1
ѵ
由于镜像传感器改变原传感器阵列的布局,在对角 фѤག ܱ
特殊点的定位优于三阵元、四阵元阵列,总体定位 ᦊӝ
۫
(a) ӝ۫ࠀͯឨࣀѬౢ
精度介于四阵元与三阵元阵列之间,如表1所示。
10
10 Яᦊӝ۫
ѵS14
8 ܱᦊӝ۫
ѵS123
8 ѵS124 ܱᦊӝ۫
ѵS1234 6
ࠀͯឨࣀ/cm 6 4 ࠀͯឨࣀ/cm 4
2
2
0
1 2 3 4 5 6 7 8
0
2 4 6 8 10 12 14 16 ጸ
фѤགᎄՂ (b) ˀՏӝ۫ࠀͯឨࣀ
图 15 不同数量传感器阵列定位误差比较 图 16 定位误差与冲击点位置的关系
Fig. 15 Comparison of positioning errors of dif- Fig. 16 Relationship between positioning error
ferent number of sensor arrays and impact region