
Page 9 - 应用声学2019年第2期
P. 9
第 38 卷 第 2 期 钟利民等: HDP-HSMM 的磨削声发射砂轮钝化状态识别 155
为不适用于真实数据的几何分布;(2) 必须指定一 θ j |H, λ ∼ H (λ) , j = 1, 2, · · · , (8)
定数量的隐藏状态。 ω j |Ω ∼ Ω, j = 1, 2, · · · , (9)
作为对 HMM 的改进,HSMM 解决了真实数据
τ := 0, s := 1, while τ < T do:
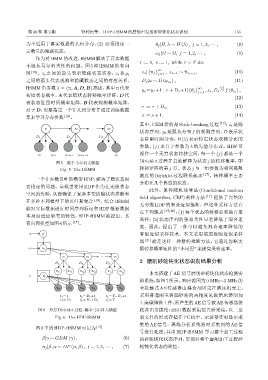
不服从马尔科夫性的问题。图 5 即 HSMM 的有向
∞ (10)
图 [18] 。z t 之间的箭头表示隐藏状态转移,z t 和 y t z s | {π j } j=1 , z s−1 ∼ ˜ π z s−1 ,
之间的箭头代表观测和隐藏状态之间的对应关系。 D s |ω ∼ D (ω z s ) , (11)
HSMM 由参数 λ = (π, A, D, B) 描述,其中 π 代表 ∞ iid
y s =y τ +1 : τ + D s +1| {θ j } j=1 , z s , D s ∼ f (θ z s ) ,
初始状态概率,A 代表隐状态转移概率矩阵,D 代
(12)
表状态驻留时间概率矩阵,B 代表观测概率矩阵。
τ := τ + D s , (13)
对于 D,需要指定一个非几何分布并通过训练数据
集来学习分布参数 [18] 。 s := s + 1. (14)
其中,GEM 指的是 Stick-breaking 过程 [19] ;z t 是隐
⊲⊲⊲
z z z S
状态序列;y t 是服从分布 f 的观测序列;D 表示状
D D D S
态驻留时间分布, H(λ) 表示特定状态观测分布的
⊲⊲⊲ ⊲⊲⊲ ⊲⊲⊲ 参数,{j} 来自于参数为 λ 的先验分布 H。HDP 可
视作一个无穷状态转移空间,每一个 {j} 都是一个
y y D y D⇁ y D⇁ D y T
Dirichlet 过程并且被解释为状态 j 的转移概率,即
图 5 隐半马尔科夫模型
Fig. 5 The HSMM 转移矩阵的第 j 行。状态 j 与一组参数为相同离散
测度的 Dirichlet 过程联系起来 [17] 。转移概率主要
一个非参数贝叶斯模型HDP,解决了隐状态需
分布在几个典型的状态。
要指定的问题。该模型使用 HDP 作为在无限状态
此外,条件随机场算法 (Conditional random
空间的先验,从而确保了复杂多变的隐状态推断和
field algorithm, CRF) 采样方法 [17] 提供了完整的
在多种不同模型下的贝叶斯混合 [19] 。结合 HSMM
无穷维 HDP 的有效近似推断。但这种采样方法存
能对实际数据进行时间序列标记和 HDP 根据数据
在下列缺点 [17,20] :(1) 每个状态的转移必须独自重
本身自适应聚类的特性,HDP-HSMM 被提出。其
采样;(2) 状态序列的强相关性显著降低了混合速
有向图模型如图6所示 [17] 。
度。因此,提出了一种可以避免混合速率降低的
γ β 有限近似采样技术。本文采用的弱极限近似采样
器 [21] 就是这样一种新的推断方法,它通过忽略无
α p i 限转移概率矩阵的“小尾巴”来提高采样速率。
⊲⊲⊲
z z z S
2 磨削砂轮钝化状态识别结果分析
D D D S
χ ⊲⊲⊲ χ ' χ ⊲⊲⊲ χ ' χ ⊲⊲⊲ χ '
t t t t t s t s 本文搭建了AE 信号磨削砂轮钝化状态检测实
λ θ i
验系统,如图7所示。响应范围为0 MHz∼3 MHz的
y ⊲⊲⊲ y ' y ⊲⊲⊲ y ' y ⊲⊲⊲ y ' 全接触式 AE 传感器由耦合剂固定在磨床机壳上。
t t t t t s t s
t / t /D +1 t s/T֓D s+1 采用普通刚玉树脂砂轮的高精度轧辊磨床磨削加
ϕ ϕ t s /T
ϕ
t /D t /D ⇁D
工高镍铸铁工件,所产生的AE信号被AE传感器接
图 6 分层 Dirichlet 过程 -隐半马尔科夫模型 收并由安捷伦 u2331 数据采集装置所采集,以二进
Fig. 6 The HDP-HSMM 制文件的形式存储在 PC 机中。示波器实时显示采
集的 AE 信号。离线分析系统将对采集到的 AE 信
图6中的HDP-HSMM可记为 [17]
号进行处理,并由 HDP-HSMM 学习整个加工过程
β|γ ∼ GEM (γ) , (6) 的砂轮钝化状态序列,实现对整个磨削加工过程砂
π j |β, α ∼ DP (α, β) , j = 1, 2, · · · , (7) 轮钝化状态的监控。