
Page 106 - 应用声学2019年第4期
P. 106
566 2019 年 7 月
T10 -3
60 16 0.08
0.08
14
50 0.07 50 50 0.07
12
0.06 40 10 40 0.06
40
ᡰሏ/m 30 0.05 ᡰሏ/m 30 ᄬಖ 8 ᡰሏ/m 30 0.05
0.04
0.04
20 0.03 20 6 20 0.03
0.02 4 0.02
10 10 10
0.01 2 0.01
0 0 0
60 40 20 0 -20-40-60 60 40 20 0 -20-40-60 60 40 20 0 -20-40-60
வͯᝈ/(O) வͯᝈ/(O) வͯᝈ/(O)
(a) ܫေҒᄊڏϸ (b) ᄬಖ (c) ຉ־
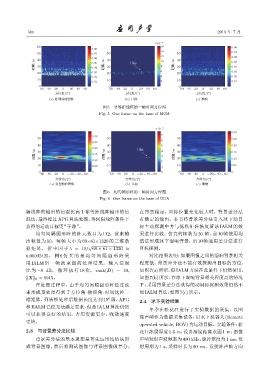
图 5 非等距线阵的一帧时间方位图
Fig. 5 One frame on the base of MGA
T10 -3
0.30
0.30 7
50 50 50 0.25
6
0.25
40 40 5 40 0.20
0.20 ᄬಖ 4
ᡰሏ/m 30 0.15 ᡰሏ/m 30 3 ᡰሏ/m 30 0.15
20
20
0.10
2 20 0.10
10 0.05 10 1 10 0.05
0 0 0 0 0 0
60 40 20 0 -20-40-60 60 40 20 0 -20-40-60 60 40 20 0 -20-40-60
வͯᝈ/(O) வͯᝈ/(O) வͯᝈ/(O)
(a) ܫေҒᄊڏϸ (b) ᄬಖ (c) ຉ־
图 6 均匀圆形阵的一帧时间方位图
Fig. 6 One frame on the base of UCA
隔线阵的输出的信混比高于非等距线阵输出的信 在背景稳定、目标位置变化较大时,背景差分法
混比,最终经过 APG 算法处理,等间隔线阵条件下 有稳定的输出。本节将背景差分法引入冰下动目
获得的运动目标更“干净”。 标主动探测中并与低秩矩阵恢复算法 IALM 的效
均匀间隔圆形阵的阵元数目为 112,波束输 果进行比较。仿真的帧数为 20 帧,前 10 帧使用均
出帧数为 10,每帧大小为 69×61×1320 的三维数 值法形成冰下混响背景,后 10 帧运用差分法进行
√
据 矩 阵, 折 中 因 子 λ = 10/ 69 × 61 × 1320 ≈ 目标探测。
0.00042425。 图 6 仿 真 的 是 均 匀 间 隔 圆 形 阵 采 对比结果表明:如果图像之间的混响背景相关
用 IALM 后一帧波束图的处理结果。 输入信混 程度低,背景差分法不能有效探测出目标的方位,
比 为 −8 dB。 循 环 执 行 18 次, rank(D) = 10, 如图 7(a) 所示,但IALM方法在此条件下仍然使用,
∥X∥ 0 = 8915。 如图 7(b) 所示;在冰下混响背景相关程度高的情况
在处理过程中,由于均匀间隔圆形阵经过波 下,采用背景差分法获得的动目标探测效果仍然不
束形成预处理得到了方位角 -俯仰角 -时间这种三 如IALM算法,如图7(c)所示。
6
维矩阵,列转换处理后数据长度达到 10 级,APG 2.4 冰下实验结果
和EALM 已经无法满足要求,但是 IALM 算法仍然
冬季在松花江进行了实验数据的采集,以图
可以获得良好的结果,占用资源更少,收敛速度
像声呐作为数据采集设备,以水下机器人 (Remote
更快。
operated vehicle, ROV)为运动目标。实验条件:松
2.3 与背景差分法比较 花江冰层厚度 0.6 m,设备深度距离水面 1 m;图像
背景差分法的基本思想是首先运用均值法形 声呐发射声波频率为400 kHz,脉冲宽度为1 ms,发
成背景图像,然后将测试图像与背景图像做差分。 射周期为 1 s,采样时长为 60 ms。发射阵声轴方向