
Page 149 - 应用声学2019年第4期
P. 149
第 38 卷 第 4 期 黄惠祥等: 分布式压缩感知麦克风阵列多声源方位估计 609
列,阵元数为圆周6个阵元。将声源可能存在的空间 因此不对其做 RMSE 的比较。其中,CS-OMP 算
按照间隔15 划分为 24个空间域集。语音信号选取 法和 DCS-SOMP 算法选择的能量最高的频点阈值
◦
TIMIT标准语音信号,信号时间长度为 5 s,语音信 η = 35%,DCS-SOMP 算法对 128 个数据块进行联
号采样率为32 kHz,处理帧长为128个点,每帧信号 合稀疏估计,两类算法的稀疏度均为2。
采用汉明窗加窗处理,做128点离散傅里叶变换。实
1.0
验通过对语音信号叠加不同程度的高斯白噪声后
0.9
形成不同信噪比的语音信号,信噪比的计算公式为 0.8
0.7
E signal
SNR = 10 lg , (15) 0.6
E noise ॆʷӑηՂूए 0.5
其中,E signal 为多个声源叠加后的信号能量,E noise 0.4
为噪声信号的能量。通过房间混响产生工具 [16] 获 0.3
取不同混响程度下的房间冲激响应与语音信号进 0.2
0.1
行卷积形成不同房间冲激响应情况下的语音信号。
0
考虑实验中设置算法的分辨率为 15 ,因此采 0 50 100 150 200 250 300 350 400
◦
ࠄᬅᝈए/(O)
用样条插值法进行均方根误差 (Root mean square (a) η٪උ12.2 dB
error, RMSE) 做性能评估 [17] ,计算公式为
1.0
v
u N 0.9
1
u ∑
¯
2
RMSE = t (θ K − θ K ) , (16) 0.8
N
K=1 0.7
其中,N 为目标声源的方位估计次数,θ K 为算法估 ॆʷӑηՂूए 0.6
0.5
¯
计的目标声源角度,θ K 为目标声源的实际角度。多 0.4
声源定位效果的评估方法为先对算法的定位结果 0.3
做定性分析,在算法对多个声源的定位结果均为正 0.2
0.1
确的情况下,再计算每个声源单独的RMSE结果。
0
0 50 100 150 200 250 300 350 400
2.2 仿真结果与分析 ࠄᬅᝈए/(O)
(b) η٪උ8.2 dB
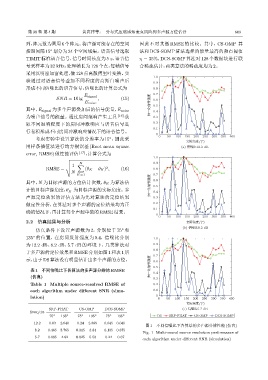
仿真条件下设置声源数为 2,分别位于 75 和
◦
135 的位置,在房间反射强度为 0.4,信噪比分别 1.0
◦
为 12.2 dB、8.2 dB、5.7 dB 的环境下,几类算法对 0.9
于多声源的定位效果和 RMSE分别如图 1 和表 1 所 0.8
0.7
示,由于DS算法没有明显估计出多个声源的方位, 0.6
表 1 不同信噪比下各算法的多声源分辨的 RMSE ॆʷӑηՂूए 0.5
0.4
(仿真)
0.3
Table 1 Multiple source-resolved RMSE of 0.2
each algorithm under different SNR (simu- 0.1
lation) 0 0 50 100 150 200 250 300 350 400
ࠄᬅᝈए/(O)
SRP-PHAT CS-OMP DCS-SOMP (c) η٪උ5.7 dB
SNR/dB
75 ◦ 135 ◦ 75 ◦ 135 ◦ 75 ◦ 135 ◦ DS SRP-PHAT CS-OMP DCS-SOMP
12.2 0.03 2.640 0.24 2.895 0.045 0.045
图 1 不同信噪比下各算法的多声源分辨性能 (仿真)
8.2 0.465 3.765 0.315 3.84 0.135 0.375
Fig. 1 Multi-sound source resolution performance of
5.7 0.885 4.62 0.825 5.58 0.24 0.87
each algorithm under different SNR (simulation)