
Page 151 - 应用声学2019年第4期
P. 151
第 38 卷 第 4 期 黄惠祥等: 分布式压缩感知麦克风阵列多声源方位估计 611
上不发生改变。说明 DCS-SOMP 算法在面对不同 3 实验与分析
的房间反射强度时,其定位效果具有更好的鲁棒性。
从表 2 中可以看出,SRP-PHAT 算法、CS-OMP 算 3.1 实验设置
法和 DCS-SOMP 算法都能够估计出声源的位置, 实验地点为厦门大学艺术学院音乐厅,房间
在房间反射强度增加的情况下,三类算法的 RMSE 尺寸为 30 m×20 m×6 m,结构为正常音乐厅结构,
值都有增加,但是 DCS-SOMP 算法的 RMSE 值在 采用吸声设计。房间的传输响应 [18] 可以分为 3 个
几类算法中都是最低的,具有更好的方位估计分 部分:直达声的传输响应;在直达信号到达之后
辨率。 的 50 ms 内到达的早期混响信号的传输响应,该部
当声源个数继续增多时,声源空间稀疏程度将 分严重影响信号处理的性能;以及后期的混响信
进一步下降,影响了 CS 重构性能。为了评估 DCS 号的传输响应。房间的早期混响时间通过实测分
理论应用在多声源场景下的方位估计能力,仿真 析 [19] 约为 30 ms。实验采用六元麦克风圆形阵列
实验中设置声源数为 3,分别位于 75 、135 、195 , 采集板进行语音信号的采集,阵列直径为 70 mm,
◦
◦
◦
在信噪比为 12.2 dB 和房间反射强度为 0.4 的环境 语音信号采集采样率为 32 kHz。实验采集的语音
下,分别采用几类算法对声源进行方位估计。设置 信号为 TIMIT标准语音信号,播放设备为Marshall
CS-OMP算法和 DCS-SOMP算法的稀疏度为 3,其 Kilburn 移动式无线蓝牙音箱。设置两个声源分别
他参数设置与上文相同。几类算法的方位估计结 放置于阵列前方 75 和135 两个方位。实验中播放
◦
◦
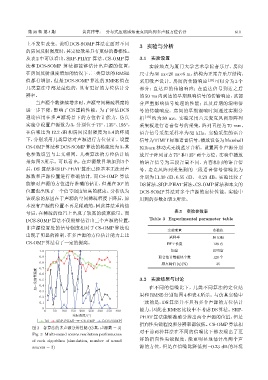
果如图 3 所示。可以看出,在声源数目增加到 3 个 的语音信号为三段音量不同、内容相同的语音信
后,DS 算法和 SRP-PHAT 算法已经基本无法对声 号,麦克风阵列采集到的三段语音信号信噪比为
源数和声源位置进行准确估计,而 CS-OMP 算法 分别为 11.30 dB、6.55 dB、−0.23 dB。实验比较了
能够对声源的方位进行准确的估计,但是在 30 的 DS算法、SRP-PHAT算法、CS-OMP 算法和本文的
◦
位置也出现了一个信号强度较高的波束。分析认为 DCS-SOMP 算法对多个声源的定位性能。实验中
该现象的原因在于声源的空间稀疏程度下降后,原 用到的参数如表3所示。
本没有声源的位置不再是稀疏的,因此算法重构信
号后,在稀疏的位置上出现了较高的波束能量。而 表 3 实验参数表
DCS-SOMP 算法不仅能够估计出三个声源的位置, Table 3 Experimental parameter table
非声源位置处的信号强度相对于 CS-OMP 算法也
实验变量 参数值
出现了明显的抑制,在多声源的方位估计能力上比 采样率 16 kHz
CS-OMP算法有了一定的提高。 FFT 长度 128 点
1.0 加窗 汉明窗
0.9 联合估计数据块个数 128 个
0.8 频点阈值 (η)(%) 35
0.7
ॆʷӑηՂूए 0.6 3.2 实验结果与讨论
0.5
0.4
0.3 在不同的信噪比下,几类不同算法的定位结
果和 RMSE 分别如图 4 和表 4 所示。与仿真实验中
0.2
0.1 一致的是,DS 算法并不具有多个声源的方位估计
0 能力,因此在 RMSE 比较中不考虑 DS 算法。SRP-
0 50 100 150 200 250 300 350 400
ࠄᬅᝈए/(O)
PHAT 算法能够准确分辨出两个声源的位置,但是
DS SRP-PHAT CS-OMP DCS-SOMP
指向性尖锐程度和分辨率都较低。CS-OMP算法相
图 3 各算法的多声源分辨性能 (仿真,声源数 = 3)
对于前两种算法在不同的信噪比下都表现出了更
Fig. 3 Multi-sound source resolution performance
of each algorithm (simulation, number of sound 好的指向性尖锐程度,能更明显地估计出两个声
sources = 3) 源的方位,但是在信噪比降低到 −0.23 dB 的环境