
Page 224 - 应用声学2019年第4期
P. 224
684 2019 年 7 月
A的二维DCT 可以通过 T × B × T 获得。因为 T 钥确定包含重要信息的方块,与此同时,利用视觉系
′
是一个标准正交矩阵,所以它的逆变换形式和变换 统的照明掩蔽特性以及纹理掩蔽特性将块分类,并
形式相同,因此矩阵 B 的二维 DCT 由 T × A × T 通过判决,提取隐藏信息。
′
计算得出。
3 仿真及结果分析
2.2 信息嵌入与提取
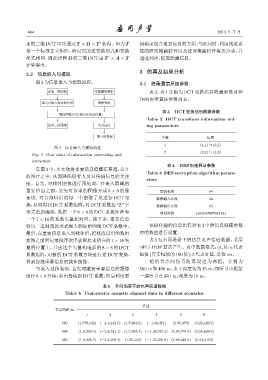
图3为信息嵌入与提取流程。 3.1 隐蔽通信系统参数
Ԕݽ̄ϙڏϸ ॠᬥᘩᄊ 表 3、表 4 分别为 DCT 变换信息隐藏参数对和
DES加密算法参数列表。
ᆸࠀԻࢦКϸጉᄊͯᎶ Ꮆ˽
表 3 DCT 变换信息隐藏参数
ᣒʹڏϸ(Ի̿ښНनڤՌ͜୧)
Table 3 DCT transform information hid-
Ԕݽ̄ϙڏϸ Ꮆ˽ᤇԔ ing parameters
ࢦКᄊ 个数 位置
1 (4,1) 与 (3,2)
图 3 信息嵌入与提取流程
2 (2,2) 与 (1,3)
Fig. 3 Flow chart of information embedding and
extraction
表 4 DES 加密算法参数
在图 3中,本文欲将重要信息隐藏在普通、公开
Table 4 DES encryption algorithm param-
的图片之中,从而降低窃听人员对传输信息的关注
eters
度。首先,对载体图像进行预处理。在嵌入隐藏的
重要信息之前,要先对原来的图像分成 8 × 8 的像 密钥长度 64
素块,对分割以后的每一个图像子块进行 DCT 变 数据输入长度 64
换,从而得到DCT系数矩阵;对DCT系数按“Z”字 数据输出长度 64
形式重新编排,是把一个 8 × 8 的 DCT 系数矩阵和 预设密钥 1234567897654321
一个 1 × 16 的系数矢量相对应。接下来,重要信息
将以二进制流的形式嵌入到原始图像 DCT系数中。 依据传输的信息比特对表3 中的信息隐藏参数
最后,在重要信息嵌入到载体后,把修改以后的数组 对的数值进行设置。
按照之前所记录排序次序放到原来所在的1 × 16矢 表 5 为不同场景下的仿真水声信道数据,采用
量的位置上,并由这个矢量构造新的 8 × 8 的 DCT BELLHOP 算法产生。表中数据格式:(a, b),a 代表
系数矩阵,对新的 DCT系数方块进行逆DCT 变换, 幅值(真实幅值的100倍);b代表时延,单位ms。
得到加载重要信息的载体图像。 通信节点间仿真距离设定为两组,分别为
与嵌入过程类似,首先对藏有重要信息的图像 500 m和498 m,水下深度均为15 m;窃听节点距某
进行8 × 8分块,求出每块的DCT系数,然后利用密 一通信节点450 m,深度为15 m。
表 5 不同场景下的水声信道数据
Table 5 Underwater acoustic channel data in different scenarios
多途
节点间距/m
1 2 3 4 5 6
500 (1.575,341) (−2.4,342.5) (1.7,364.8) (−1.38,371) (0.95,379) (0.25,429.5)
498 (1.6,339.6) (−2.4,341.1) (1.7,363.3) (−1.38,370.2) (0.95,378.3) (0.25,428.5)
450 (1.8,308.5) (−2.4,309.2) (1.85,332) (−1.35,339.8) (0.88,348.2) (0.22,4112)