
Page 157 - 《应用声学》2020年第1期
P. 157
第 39 卷 第 1 期 许高凤等: 基于组合线阵的近程运动小目标被动定位跟踪 153
150
x.
y.
z. ֓⊲
-10 x.
y. 100
z. ֓⊲ x.
y. ֓
z. ֓⊲
-15 m 50
/
y
-20 0
200
400
0 200
0 -50
y/m
-200 -200 x/m
-50 0 50 100 150 200 250 300
x/m
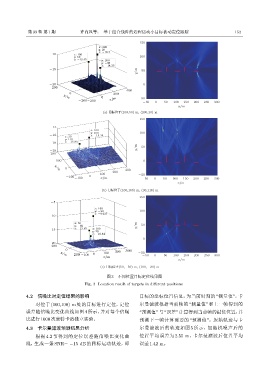
(a) ᄬಖͯ̆(100,50) m, (200,20) m
150
-14
x.
y. 100
-16 z. ֓⊲
x.
y.
-18 z. ֓⊲
m 50
/
-20 y
200
100 0
0 300
y/m
200
100 -50
-100 0
-100 x/m -50 0 50 100 150 200 250 300
x/m
(b) ᄬಖͯ̆(100,100) m, (30,110) m
150
-5
x.
y. ֓ 100
z. ֓⊲
-10
x. m 50
y. ֓ /
-15 z. ֓⊲ x. y
y.
z. ֓⊲
0
-20
200
0 200 300
-200 -100 0 100 -50 0 50 100 150 200 250 300
-50
y/m
x/m
x/m
(c) ᄬಖͯ̆(50,-50) m, (100,-20) m
图 3 不同位置目标定位结果图
Fig. 3 Location result of targets in different positions
4.2 信噪比对定位结果的影响 目标的坐标位置信息,为当前时刻的 “测量值”,卡
对位于 (100,100) m 处的目标进行定位,定位 尔曼滤波根据当前帧的 “测量值” 和上一帧得到的
误差随信噪比变化曲线如图 4 所示,并对每个信噪 “预测值” 与“误差” 计算得到当前帧的最优位置,并
比进行1000次蒙特卡洛独立实验。 预测下一帧计算需要的 “预测值”。原始轨迹与卡
4.3 卡尔曼滤波预测结果分析 尔曼滤波后的轨迹如图 5 所示,加随机噪声后的
根据 4.2 节得到的定位误差随信噪比变化曲 位置平均误差为 2.55 m,卡尔曼滤波后位置平均
线,生成一条 SNR= −15 dB 的目标运动轨迹,即 误差1.42 m。