
Page 159 - 《应用声学》2020年第1期
P. 159
第 39 卷 第 1 期 许高凤等: 基于组合线阵的近程运动小目标被动定位跟踪 155
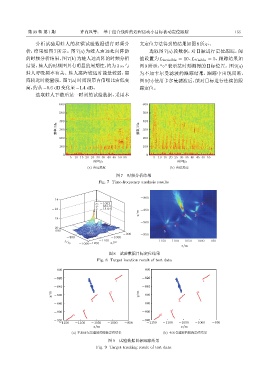
分析试验用蛙人的拉锯试验数据进行时频分 文定位方法得到的结果如图8所示。
析,结果如图 7 所示。图 7(a) 为蛙人由远处向阵游 选取图 7(a) 段数据,对目标进行定位跟踪,阈
的时频分析结果,图7(b) 为蛙人远离阵的时频分析 值设置为 L Invisible = 10、L Visible = 5,跟踪结果如
结果。蛙人的时频图具有明显的周期性,约为3 s,与 图 9 所示,“◦” 表示某时刻测得的目标位置。图9(a)
蛙人呼吸频率有关。蛙人离阵较远时能量较弱,离 为不加卡尔曼滤波的跟踪结果,跟踪中出现间断,
阵较近时能量强。图7(a) 时间段带内信噪比由低变 图 9(b) 使用卡尔曼滤波后,能对目标进行连续的跟
高,约从−9.6 dB变化至−1.4 dB。 踪定位。
选取蛙人下潜后某一时刻的试验数据,采用本
600 600
500 500
400 400
ᮠဋ/Hz 300 ᮠဋ/Hz 300
200 200
100 100
0 0
5 10 15 20 25 30 35 40 45 50 55 5 10 15 20 25 30 35 40 45 50 55
ᫎ/s ᫎ/s
(a) ႀᤊԣᤃ (b) ႀᤃԣᤊ
图 7 时频分析结果
Fig. 7 Time-frequency analysis results
-800
-14
x: -1062 1
y: -843.6
-16 z: -15.64 -850
y/m 3 2
-18
-900
4
-20
-600 5
-900 -950
-800 -1000
-1100 -1150 -1100 -1050 -1000 -950
-1000 -1200 x/m
y/m
x/m
图 8 试验数据目标定位结果
Fig. 8 Target location result of test data
-800 -800
-820 -820
1 1
-840 -840
y/m -860 2 y/m -860 2
3 3
-880 -880
4 4
-900 -900
5 5
-920 -920
-1150 -1100 -1050 -1000 -950 -1150 -1100 -1050 -1000 -950
x/m x/m
(a) ˀҫӵ࠷డฉᄊᡲᢎࠀͯፇ౧ (b) ӵ࠷డฉᄊᡲᢎࠀͯፇ౧
图 9 试验数据目标跟踪结果
Fig. 9 Target tracking result of test data