
Page 67 - 《应用声学》2020年第3期
P. 67
第 39 卷 第 3 期 徐利刚等: 一种基于弱监督学习的声图小目标快速检测方法 387
缆目标的识别问题,Maussang 等 [7] 提出了局部统
0 引言
计参数融合的思想。在合成孔径声呐图像中,目标
水下图像中小目标的自动检测一直以来是声 的阴影与高亮区域也是目标识别的重要特征 [8] 。此
图解译领域所研究的重要课题,其成果可应用于许 外,Sawas 等 [9] 提出利用分类器级联方式可实现水
多水下探查任务中,包括海底打捞、小目标探测、 下目标快速检测。
管线追踪等。文献 [1] 中,目前较为先进的深度学 一般情况下,声图中小目标的检测主要关注两
习框架 YOLO 被用于声呐图像的小目标检测,通 类课题:(1) 对大范围水下场景中感兴趣区域 (Re-
过大量的训练迭代,取得了较好的检测效果。然而 gions of interests, ROI) 的提取;(2) 为每一可能含
在水下应用场景中,数据的获取往往需要耗费较 有小目标的感兴趣区域赋予正确的标签。这些课题
多的时间和财力。在某些自主检测应用场景下,无 在广义上都可归为对图像中潜在的候选区域的分
论人工辅助判读还是计算机的算力,都受到了一定
类问题。为降低遍历图像的时间开销、增强对图像
程度的限制。同时,由于目前对目标先验知识和抵
的概括,通常需要进行数据降维,将图像变换至某一
近目标观察手段的缺少,目标的确认十分困难。在
特征域,实现对内容的抽象。
大多数情况下,研究人员所掌握的数据集相对较
本文提出了一种基于离散余弦变换 (Discrete
小,标注也不完善,很难对监督学习算法模型进行
cosine transform, DCT) 和 K 近邻 -高斯混合模型
有效的训练。在这种条件下,无监督或弱监督学习
(K-nearest Gaussian mixture model, KN-GMM)的
方法则更为适用。Klausner 等 [2] 讨论了一种通过
检测方法。检测过程共分为两个步骤,步骤 1 中,首
对海底散射建模,来预测水下目标是否存在的方
先从声图中提取一系列包含可疑目标的候选区域,
法。Wang 等 [3] 将行人检测领域中的方向梯度直方
图 (Histogram of oriented gradient, HOG) 和支持 并评估置信度用于辅助决策。这类检测方法可以胜
向量机 (Support vector machine, SVM) 用于水下 任大多数实时目标的标注任务,但对于有更高精确
目标的检测。Williams [4] 通过一组模板提取目标的 度要求的任务,需要采用步骤 2 的方法进一步精化
阴影,并根据阴影的特征进行决策。Kim 等 [5] 基于 结果,即通过候选框回归和决策以精确分析和筛选
自适应增强算法实现了基于声图的实时水下目标 备选目标,这一处理有效地降低了虚警率,但在计算
检测。Ma 等 [6] 利用最小二乘支持向量机方法降低 消耗上有所增加。本文所提出的快速检测方法框架
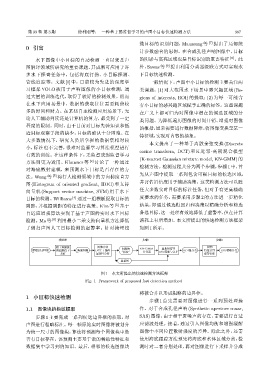
了侧扫声图人工目标检测的虚警率。针对掩埋线 如图1所示。
ᮕܫေ ൦ᰡ1 ൦ᰡ2
ᄱࣰฉ ڏϸѬڱ ڏҟ
௭ᗃڏૉ
ڏϸڱ
ԔݽSASڏϸ ๒अᡲᢎʾ ๒अڏϸ DCT+ᩗᆊ þૉጯÿ KN-GMM ROIኙᤥˁՌࣳ ROIዤѬዝ ྲढ़ᝠካ ROIድᆸѬዝ
Ѭዝ٨
᧔ನ ௭ᗃভѬౢ ᘿԝᬔ
௭ᗃڏ
图 1 本文所提出的快速检测方法框架
Fig. 1 Framework of proposed fast detection method
将被合并以形成粗略的边界框。
1 小目标快速检测
步骤 1 首先需要对图像进行一系列预处理操
1.1 图像块的指纹提取 作。对于合成孔径声呐 (Synthetic aperture sonar,
步骤 1 主要完成一系列候选边界框的获取,对 SAS) 图像,由于相干斑噪声的存在,需要进行自适
声图进行粗略标注。每一帧原始实时图像将被划分 应滤波处理。接着,通过引入图像均衡和增强缓解
为统一尺寸的图像块,算法将预测每个图像块中是 图像中不同位置散射强度的差异。除此之外,还需
否有目标存在。该预测主要基于谱的稀疏性特征和 使用海底跟踪方法预先将海底和水体区域分离,检
数据集中学习到的知识。最后,相邻的候选图像块 测时对二者分别处理,再对图像进行下采样并分成