
Page 81 - 《应用声学》2020年第4期
P. 81
第 39 卷 第 4 期 吴樵等: 利用激光多普勒测振仪的空气耦合超声声场测量 567
度为 7.7 ,使空耦换能器激励的漏兰姆波主要为 A0 合模态计算和到时信息,可以确定时域信号中第一
◦
模式。 个波包为 A0 模式的漏兰姆波,实现了对空气和固
使用激光测振仪测量板内的漏兰姆波。板上方 体板中的漏兰姆波的实验观测。电测法中,接收信
空气中的声波能量主要来源于空耦换能器辐射的 号的时域和频谱有所不同,表现出拖尾更长、带宽
直达纵波和反射波,漏兰姆波相对比较微弱。为了 更窄的特点,这是因为受到了接收换能器传递函数
尽可能排除空气中直达波和反射波的干扰,选择在 的影响。激光多普勒测振仪具有宽频带的特点,对
板下方观测空气中的漏兰姆波,测量时在板的侧面 待测信号的影响较小。
布置障碍物遮挡,避免空耦换能器的直达波的干扰。
150
另外,使用另一个空耦换能器在一发另一收 (TR)
100
模式下接收,以接收电压信号作为对照 (以下简称
电测法)。 50
ႃԍ/mV 0
6000
-50
5000 -100
Ꮖᤴए/(mSs -1 ) 4000 -150 500 520 540 560 580 600 620
3000
2000 ᫎ/ms
(a) ۫
1000 1.0
0 0.8
0 500 1000 1500 2000 2500
ᮠဋ/kHz
图 5 漏兰姆波群速度频散曲线 ॆʷӑࣨϙ 0.6
Fig. 5 The group velocity dispersion curve of the 0.4
leaky Lamb wave
0.2
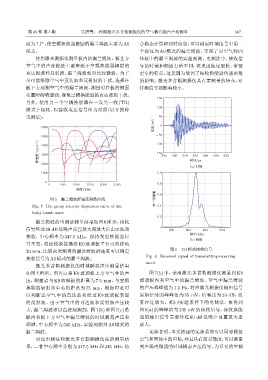
漏兰姆波的电测法测量结果如图 6 所示,接收
信号经过60 dB低噪声前置放大器放大后由示波器 0 200 300 400 500
ᮠဋ/kHz
接收,中心频率为 347.5 kHz。保持发射换能器位
(b) ᮠ៨
置不变,将接收换能器沿 K9 玻璃板平行方向移动
20 mm,比较两次测得的漏兰姆波群速度可以确定 图 6 TR 模式接收信号
Fig. 6 Received signal of transmitting-receiving
接收信号为A0模式的漏兰姆波。
mode
激光多普勒测振仪的时域瞬态声压测量结果
如图 7 所示。图 7(a) 是 K9 玻璃板上方空气中的声 图 7(b) 中,使用激光多普勒测振仪测量到 K9
压,测量点与 K9 玻璃板的距离为 7.5 mm,与空耦 玻璃板内和空气中的漏兰姆波,空气中漏兰姆波
换能器辐射面中心的距离为 75 mm。根据时延可 的声压峰峰值为 1.2 Pa,对应激光测振仪输出信号
以判断出空气中的直达波和经过 K9 玻璃板表面 原始信号的峰峰值为 55 mV,信噪比为 33 dB,没
的反射波。由于空气中的直达波和反射波声压较 有经过放大。相同实验条件下的电测法,要得到
大,漏兰姆波难以直接观测到。图 7(b) 和图 7(c) 是 图 6(a) 的峰峰值为 235 mV 的接收信号,接收换能
板内和板下方空气中漏兰姆波的时域瞬态声压和 器的输出信号需要经过 60 dB 低噪声前置放大器
频谱,中心频率为 345 kHz,实验观测到 A0 模式的 放大。
漏兰姆波。 实验表明,本文搭建的实验系统可以同时测量
对比电测法和激光多普勒测振仪法的测量结 空气和固体中的声场,并且具有高灵敏度,可以测量
果,二者中心频率分别为 347.5 kHz 和 345 kHz,结 到声场内微弱的时域瞬态声压信号,为常见的空耦