
Page 84 - 《应用声学》2020年第5期
P. 84
726 2020 年 9 月
10 0
y z x
2 振动噪声激励确定 10 -1
ҫᤴए/(mSs -2 ) 10 -2
为验证模型准确性,需对模型进行验证。通过
试验获取实车在怠速工况下悬置点上的振动加速 10 -3
度数据和各个子系统声载荷数据,将试验获取的声
振数据加载于模型对应位置,并计算模型的响应,与 10 -4
20 32 50 80 125 200 315 500 800 1250 2000 3150 5000
试验数据进行对比,以确定模型准确性。试验场地
1/3φᮠሮ˗ॷᮠဋ/Hz
为空旷水泥地,无风,拖拉机定置,发动机怠速。所
用仪器为 B & K2635 加速度传感器与放大器、ND2 图 6 左前悬置点振动加速度频谱图
型声级计、VDN-R/TL 车辆振动测试数据采集器、 Fig. 6 Left front mount point vibration accelera-
tion spectrum
AUTOTEST 数据采集分析系统及计算机,如图 4
所示。
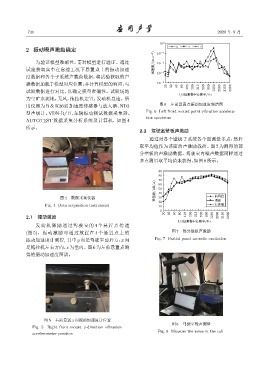
2.2 驾驶室壁板声激励
通过对各个壁板子系统各个面测量多点,然后
取平均值作为该面的声激励载荷。图7 为测得的部
分壁板的声激励数据。驾驶室内噪声数据同样通过
多点测量取平均值来获得,如图8所示。
90
80
70
ܦԍጟ/dB(A) 50
60
40
图 4 数据采集仪器 30 Ғ᮳
20 ᮇ
Fig. 4 Data acquisition instrument 10 Կဝၕ
0
20 32 50 80 125 200 315 500 800
2.1 振动激励 1250 2000 3150 5000
1/3φᮠሮ˗ॷᮠဋ/Hz
发动机激励通过驾驶室的 4 个悬置点传递
(图 5),振动激励可通过放置在 4 个悬置点上的 图 7 部分壁板声激励
振动加速度计测得, 其中 y 向是驾驶室前后方,x 向 Fig. 7 Partial panel acoustic excitation
是拖拉机左右方向,z 为垂向。图6 为左前悬置点测
得的振动加速度图谱。
图 5 右前悬置 z 向振动加速度计位置
图 8 驾驶室噪声测量
Fig. 5 Right front mount z-direction vibration
Fig. 8 Measure the noise in the cab
accelerometer position