
Page 131 - 《应用声学》2021年第4期
P. 131
第 40 卷 第 4 期 贾尚帅等: 高速动车组气动噪声试验与仿真分析 615
2.2 计算方法 气动噪声分析中可以看作是刚性的,所以单级子声
源近似为零。
稳态流场计算采用剪切应力输运 (Shear stress
为了能够有效捕捉高速列车表面偶极子和空
transport, SST) k-w 模型,计算迭代 3000 步,通过
间四极子声源,在流动不太紊乱的位置创建可穿
监控残差、气动力和关键点速度,确定迭代达到收
透声源面。声源面长 12620 mm,宽 840 mm,高
敛。以稳态流场作为初始条件,采用 LES 进行瞬态
746 mm,在受电弓区域向上凸起 200 mm,如图 8
流场计算,时间和空间均采用二阶离散格式。瞬
所示。
态流场的计算首先采用 5 ×10 −4 s 的时间步长计算
1000 个时间步,每步迭代 10 次,一共计算了 0.5 s
的物理时间,相当于来流流过了约 5 倍的车身长
度,计算完成后使流场达到动态平衡。此后,将时
间步长改为 5 × 10 −5 s,每步迭代 10 次,经过 1000
步计算使流场的波动完全稳定,开始对平均压力
和平均速度进行采样,用于后续 APE 的计算。经
过500 步的采样平均场基本收敛,开始进行APE 的 图 8 可穿透声源面
计算。经过 500 步的声场计算之后,流场和声场共 Fig. 8 Permeable surface
同达到稳定,开始同时对湍流压力脉动和声场压
近场气动噪声采用 APE 求解,多普勒效应、壁
力脉动进行采样,一共进行了 2500 步的采样。在
面反射和介质折射等声学现象都能够在计算中得
空间上,采样的区域包括了整个的车身表面。计算
到考虑,本次计算所应用的方程如式(4)所示:
域进口给定速度 300 km/h,出口相对压力为 0 Pa,
2 a
1 ∂ p 2U ∂p a (U · ∇)
a
湍流度 (Turbulent intensity) 和黏性比 (Turbulent + · ∇ + (∇ · Up )
c ∂t 2 c 2 ∂t c 2
2
viscosity ratio)分别为1%和10;计算域顶部和两侧 ( a )
2 a ∂p
为对称边界,车身表面为无滑移壁面;模型校验仿真 − ∇ p + τ ∂t
工况地面和轨道为无滑移壁面,与风洞试验保持一 [ 1 ∂ p 2(U · ∇) ∂p ′ (U · ∇) ]
2 ′
′
= − + + (∇ · Up ) ,
致;模型校验完成后地面和轨道设置为移动壁面,移 c ∂t 2 c 2 ∂t c 2
2
动速度为300 km/h,与列车运行方向相反。 (4)
远场气动噪声采用可穿透声源面的 FW-H 积 式(4) 中,c 表示声速,p 表示声压,U 表示流场平均
a
分方程求解,能够同时考虑动车组表面压力脉动偶 速度,τ 表示阻尼衰减项。公式左边前两项表示声
极子噪声和空间湍流边界层的四极子噪声的贡献, 压在时间域上传播,左边后两项表示声压在空间域
本次计算所应用的方程如式(3)所示: 上传播,公式右边前两项表示声源随时间的变化,公
2 ′
1 ∂ p ∂ 2 式右边第三项表示声源在空间上的变化。
2 ′
− ∇ p = [T ij H(f)]
2
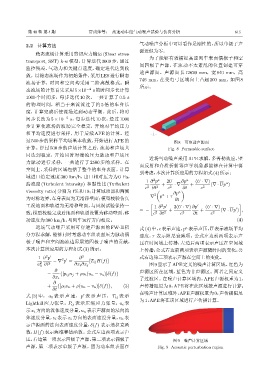
a ∂t 2 图9显示了APE定义的噪声计算区域。红色为
0 ∂x i ∂x j
∂ 声源区所在区域,蓝色为非声源区。两者之间定义
− {[p ij n j + ρu i (u n − v n )]δ(f)}
了过渡区。在噪声计算区域内,APE 声源权重为 1,
∂x i
∂
+ {[ρ 0 v n + ρ(u n − v n )]δ(f)}, (3) 声传播阻尼为 0,APE 将在此区域按声源进行计算;
∂t
在噪声计算区域外,APE声源权重为0,声传播阻尼
式 (3) 中, a 0 表 示 声 速, p 表 示 声 压, T ij 表 示
′
为1,APE将在该区域进行声传播计算。
Lighthill 应力张量,P ij 表示压缩应力张量,u i 表
示x i 方向的流体速度分量,u n 表示声源面的法向流
体速度分量,v i 表示 x i 方向的表面速度分量,v n 表
示声源面的法向表面速度分量,δ(f) 表示迪拉克函
数,H(f)表示海维赛德函数。公式左边两项表示声
压,右边第一项表示四级子声源,第二项表示偶极子 图 9 噪声计算区域
声源,第三项表示单级子声源。因为动车组表面在 Fig. 9 Acoustic perturbation region