
Page 105 - 《应用声学》2021年第5期
P. 105
第 40 卷 第 5 期 卢佳敏等: 基于 DEMON 谱和 LSTM 网络的水下运动目标噪声基频检测 749
行降维,LSTM层用于提取输入信号的时序特征,随 其中,T 为声脉冲序列之间的平均间隔,∆ n 为脉冲
后输入分类网络进行分类。 序列在周期点附近的随机摆幅,服从均值为零、方
差为δ∆的正态分布。
ᣥѣone-hotՔ᧚
准周期性随机声脉冲序列指出噪声辐射线谱
Softmaxࡏ 相对于连续谱的幅值仅取决于脉冲的随机摆幅,脉
ܸ࠵: 24
冲序列的准周期性越差,则线谱幅值越低。对于不
ᬥᘩࡏ
ܸ࠵: 128
同工况的船舶,通过选择周期性随机序列脉冲的
各个参数可以获得不同频率和幅度的线谱,以及
h t֓n h t֓n⇁ h t 谱峰频率不同、连续谱形状和衰减规律不同的功率
Պᫎ൦ᣥѣ [15]
LSTMܸ࠵ 256 谱 。
ᫎ൦ 5
LSTM LSTM LSTM 以声脉冲形状为指数衰减型为例给出具体实
现过程。第n个声脉冲的形状为 [15]
Պᫎ൦ᣥК ( )
t − t S
X t֓n X t֓n⇁ X t n S E
A n u , t 6 t 6 t ,
n
n
t
ζ = τ n (7)
n
થࣱ࡙न
Ԅሥࡏ 0, 其他,
ӑࡏ Ԅሥࡏ ܸ࠵: 256
其中,t 为脉冲起始时刻,t 为脉冲结束时刻;指数
S
E
n
n
图 5 网络结构示意图
衰减函数为
Fig. 5 The proposed deep-learning network structure
u (t) = e −γt , (8)
2 数据仿真
其中,γ 为衰减系数,τ 是脉冲持续时间。脉冲幅度
训练深度网络需要大量标定好的数据。但是, 分布遵循式(9):
真实舰船噪声数据往往比较稀缺,而且实测数据标
x − x
定是一项繁琐且容易出错的工作。因此本文首先使 A n ∼ e µ 2 . (9)
µ 2
用仿真数据对网络进行训练,在湖试中利用实测舰
每个脉冲的起始时间在桨叶周期附近服从高斯
船噪声数据对预训练好的网络进行微调后,再进行
分布:
基频估计。本节介绍舰船噪声信号的仿真方法。
对于仿真舰船噪声信号来说,周期性局部平稳 S E
t ∼ N (nT, ∆) , t = (n + 1) T. (10)
n
n
过程 [14] 和准周期性随机声脉冲序列模型 [15] 是描
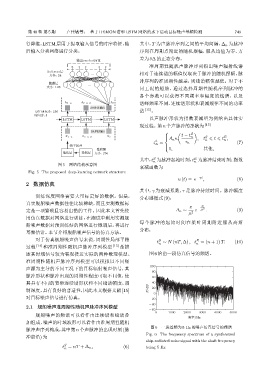
述其时域信号较为客观接近实际的两种数理模型。 图6给出一段仿真信号的频谱。
准周期性随机声脉冲序列模型可以模拟以不同噪
100
声源为主导的不同工况下的目标辐射噪声信号,其
80
脉冲形状和脉冲出现的周期性程度可取不同值,使 60
其具有不同的宽带连续谱形状和不同线谱幅度、调 40
制深度,具有良好的普适性,因此本文根据文献 [15] P/dB 20
0
对目标噪声信号进行仿真。 -20
-40
2.1 舰船噪声准周期性随机声脉冲序列模型
-60
0 1000 2000 3000 4000 5000
舰船噪声的频谱可以看作由连续谱和线谱叠
ᮠဋ/Hz
加组成,噪声的时域波形可以看作由准周期性随机
图 6 一段基频为 5 Hz 的噪声仿真信号的频谱
脉冲声序列构成,其中第n个声脉冲的出现时刻(脉
Fig. 6 The frequency spectrum of a synthesized
冲前沿)为
ship-radiated noise signal with the shaft frequency
S
t = nT + ∆ n , (6) being 5 Hz
n