
Page 137 - 《应用声学》2021年第6期
P. 137
第 40 卷 第 6 期 刘迪等: 传声器次声段灵敏度校准的误差机理研究 933
2.2 传声器灵敏度的幅相频响应 敏度与 Frederiksen 等 [7] 电声等效模型得出的结果
进一步地,研究考虑泄漏与热传导效应的校准 一致,相位灵敏度趋势是首次给出。
声压对传声器次声段灵敏度响应的影响。传声器的
3 实验验证
幅值灵敏度定义为传声器的输出电压 (等效于振膜
变形) 与校准声压的比值 [15] ,传声器的相位灵敏度 3.1 原级校准平台简介
是校准声压相较于传声器输出电压的相位偏差,传 根据第2 节对传声器灵敏度幅相频响应的仿真
声器的归一化幅值灵敏度响应与相位灵敏度响应 结果分析知,传声器在内外均压校准模式下会出现
如图8所示。 不同的灵敏度响应。为了验证内外均压校准模式下
传声器灵敏度幅值与相位响应的差异,基于搭建的
0
ܱکԍಣю 活塞发生器原级校准平台对传声器灵敏度进行内
-10
外均压校准。对传声器校准用的活塞发生器原级
-20 Яکԍಣю 校准平台结构如图 9 所示,校准平台主要设备参数
-30
ࣨϙ༧ஐए/dB -40 ፐབྷ-ࠛ࠰ࢺц 如下:
(1) 隔振基础:光学平台,台面 1200 mm ×
-50
བྷ͜-ࢺц
-60
ፐབྷ-ࢺц 900 mm × 50 mm,支撑架 1180 mm × 580 mm×
-70 བྷ͜-ࠛ࠰ࢺц 700 mm;
-80 (2) 松下MINAS A6家族伺服电机(MSMF102
10 -4 10 -3 10 -2 10 -1 10 0 10 1
L1H6M):额定转速:3000 r/min (50 Hz),电压规格:
ᮠဋ/Hz
(a) ࣨϙ־ऄ 200 V,额定输出:1000 W,额定电流:6.6 A,额定转
90 矩:3.18 Nm,最高转速:5000 r/min;
Яکԍಣю
80 (3) 伺服驱动器 (MDDLT55SF):速度控制,脉
70
冲数:23 bit (8388608 分辨率),响应频率:3.2 kHz,
ᄱͯ༧ஐए/(O) 60 ፐབྷ-ࠛ࠰ࢺц 100 mm,位移分辨率:2 pm,频率范围:0∼10 MHz,
电源电压:单相/三相200 V;
50
40
(4) 激光测振仪:振动位移测量范围:0.1 µm ∼
བྷ͜-ࢺц
30
ፐབྷ-ࢺц
20
བྷ͜-ࠛ࠰ࢺц
输出信号:模拟输出,输出电压范围:±2 V(1 MΩ)
10
ܱکԍಣю ±1 V (50 Ω),激光波长:633 nm,阻抗:50 Ω;
0
10 -4 10 -3 10 -2 10 -1 10 0 10 1 (5) 活塞发生器:校准腔内径:130 mm,校准腔
ᮠဋ/Hz
长度:393 mm,活塞外径:65 mm,泄漏时间常数:
(b) ᄱͯ־ऄ
26.8 s;
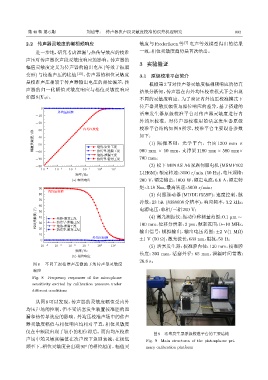
图 8 不同工况校准声压激励下的传声器灵敏度
响应
Fig. 8 Frequency responses of the microphone
sensitivity excited by calibration pressure under
different conditions
从图 8 可以发现,传声器的灵敏度幅值受内外
均压声场的控制,但不受活塞发生装置校准腔的泄
漏和热传导效应的影响。外均压校准声场中的传声
器灵敏度幅值与相位响应均相对平直,相位灵敏度
仅在中频段出现了较小的相位滞后。而内均压校准
图 9 活塞发生器原级校准平台的主要结构
声场中的灵敏度幅值在次声段下急剧衰减,在极低 Fig. 9 Main structures of the pistonphone pri-
频率下,相位灵敏度会出现90 的相位超前。幅值灵 mary calibration platform
◦