
Page 144 - 《应用声学》2023年第1期
P. 144
140 2023 年 1 月
声功率定义为在单位时间内通过单位面积上 数据进行读取记录,测量时信号源设置连续正弦波,
的声能,考虑衰减因素,声功率计算公式为 实时记录辐射力的变化,发射 5 s 后停止,待示数再
∫∫
次回到稳定后对上位机记录数据进行选取计算并
P = I(x, y, z, t)dxdy · e 2αF press , (6)
s 得到声功率。
其中,dxdy 是扫描面内的面积微元。测量得到的是
扫描面中各个离散点的数据,故式(6)离散化为
M N
∑ ∑
P = I(x, y, z, t) · ∆x∆y · e 2αF press . (7)
m=1 n=1
1.3 电声转换效率
在声功率测量时,测量换能器的端电压U T m 和
电流 I T m ,并记录处于同一周期内电压和电流的时
图 2 球面聚焦换能器
间差∆τ,由此计算换能器的电输入阻抗角为 [17]
Fig. 2 Spherical focusing transducer
θ = 2π∆τ/T. (8)
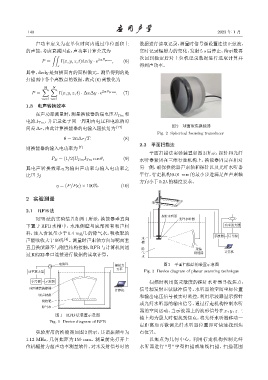
2.2 平面扫描法
则换能器的输入电功率为 [7]
平面扫描法实验装置如图 3 所示,探针和光纤
P E = (1/2)U T m I T m cos θ, (9) 水听器紧固在三维行走机构上,换能器固定在相对
其电声转换效率 η 为输出声功率与输入电功率之 另一侧,确保换能器声束轴和探针以及光纤水听器
比 [7] 为 平行,行走机构 0.01 mm 的最小步进满足在声束轴
方向小于0.2λ的精度要求。
η = (P/P E ) × 100%. (10)
2 实验测量
2.1 RFB法
ଊ᧫ඵզ٨
RFB 法的实验装置如图 1 所示,换能器垂直向 Аጜඵզ٨
下置于 RFB 水槽中,水池侧壁与底部附有吸声材 Ҫဋஊܸ٨
料,注入含氧量小于 0.4 mg/L 的除气水,吸收靶的 ᇨฉ٨ ηՂູ
声能吸收大于 99% [4] 。测量时声束轴方向与靶面垂 ඵ
യ
直且换能器不与刚性结构接触,RFB 与计算机间通 ᬔ ᐑཥ
过RS232串口连接进行数据的读取计算。 ඡ ૱ᑟ٨ ᝠካ
ඵ
ႃืဗ ᣣ࠱ҧ 图 3 平面扫描法的装置示意图
ࣱܹ
Ҫဋஊܸ٨ Fig. 3 Device diagram of planar scanning technique
ηՂູ ᇨฉ٨ 扫描时利用高灵敏度的探针水听器寻找焦点:
ု᭧ᐑཥ૱ᑟ٨ 信号源发射正弦脉冲信号,水听器的空间坐标位置
ᝠካ
ծܦెந 和输出电压信号被实时监控,利用示波器显示探针
ծஆ᭬
或光纤水听器的输出信号,通过行走机构控制水听
ᬔඡඵ
器的空间运动,当示波器上的波形信号在 x、y、z 三
图 1 RFB 法装置示意图
轴上均为最大时便找到焦点,将光纤水听器移动一
Fig. 1 Device diagram of RFB
定距离后再微调光纤水听器位置即可快速找到焦
实验所用的换能器如图 2 所示,其谐振频率为 点位置。
1.12 MHz,几何焦距为 150 mm。测量前先打开上 以焦点为几何中心,利用行走机构控制光纤
位机辐射力超声功率测量软件,对未发射信号时的 水听器进行 “弓” 字型扫描或轴线扫描,扫描范围