
Page 193 - 《应用声学》2025年第1期
P. 193
第 44 卷 第 1 期 胡园等: 沉底式矢量水听器阵辐射噪声测量系统 189
近似同方向,致使阵列接收噪声存在一定的相关性, 测量与测量阵列尺寸有限的工程设计矛盾,设计了
与理论理想条件存在一定差异。试验结果表明,在 一种新型沉底式矢量水听器阵辐射噪声测量系统。
相同孔径下,矢量阵列比声压阵列具有更好的测量 系统水下测量基阵由间距 1.5 m 的 9 阵元振速型矢
优势,并使测量阵列在 20 Hz∼2 kHz 范围内具有较 量水听器组成,测量频率范围为 20 Hz∼2 kHz。该
高的谱级信噪比,提高了固定孔径下测量阵列的低 系统小巧灵活、容易组装、布放操作便捷,可以实时
频测量能力,从而满足 20 Hz∼2 kHz 测量频段内增 监测水下目标低频低辐射噪声信号,同步采集、存
益达到8 dB的设计要求。 储和实时传输噪声数据。在千岛湖对所设计的矢量
阵辐射噪声测量系统进行了性能初步测试,考察其
2.0
Ղܦԍᤰ᥋ 指向性和近场聚焦性能。本次湖试结果表明,声压
1.5 ಖ᧚
ᅺ᧚ 阵存在对称波束,而矢量阵的单边波束使得对背景
1.0 噪声,尤其是湖底反射信号具有更强的抗干扰能力。
ࣨϙ/Pa 0.5 0 通过对比接收信号谱级,本文设计的矢量阵明显压
低了干扰噪声谱级,千岛湖试验平台月池附近环境
中,在相同孔径下具有高于声压阵约3 dB 的空间指
-0.5
向增益,该测量阵列系统在 20 Hz∼2 kHz 测量频率
-1.0
范围内达到了设计指标,为未来安静型潜艇的低频
-1.5 段辐射噪声测量提供技术基础。
0 1 2 3 4 5 6
ᫎ/s
(a) ۫ฉॎ
参 考 文 献
110
Ղܦԍᤰ᥋
100 ಖ᧚
ᅺ᧚ [1] 邱志明, 马焱, 孟祥尧, 等. 水下无人装备前沿发展趋势与关
90
键技术分析 [J]. 水下无人系统学报, 2023, 31(1): 1–9.
80 Qiu Zhiming, Ma Yan, Meng Xiangyao, et al. Analysis on
ࣨϙ/dB 70 the development trend and key technologies of unmanned
underwater equipment[J]. Journal of Unmanned Undersea
60 Systems, 2023, 31(1): 1–9.
50 [2] Yu C L, Wang R Z, Zhang X M, et al. Experimental and
numerical study on underwater radiated noise of AUV[J].
40
Ocean Engineering, 2020, 201: 107111.
30 [3] 宋超, 刘瑞杰, 郑伟伟, 等. 国外水下无人移动装备综合隐身
10 0 10 1 10 2 10 3 10 4
技术研究 [J]. 舰船科学技术, 2021, 43(19): 186–189.
ᮠဋ/Hz
Song Chao, Liu Ruijie, Zheng Weiwei, et al. Research on
(b) Ҫဋ៨
the stealth technology of foreign underwater unmanned
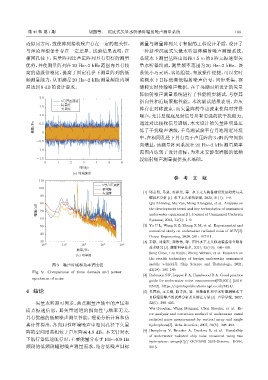
图 9 噪声时域和功率谱比较 mobile vehicle[J]. Ship Science and Technology, 2021,
43(19): 186–189.
Fig. 9 Comparison of time domain and power
[4] Robinson S P, Lepper P A, Hazelwood R A. Good practice
spectrum of noise
guide for underwater noise measurement[EB/OL]. [2018-
02-02]. https://eprintspublications.npl.co.uk/6121/.
4 结论 [5] 吴国清, 王美刚, 陈守虎, 等. 用垂直阵和单水听器测量水下
目标辐射噪声的误差分析及其修正方法 [J]. 声学学报, 2007,
矢量水听器可同步、共点测量声场中的声压和 32(5): 398–403.
质点振速信息,其矢量通道的指向性与频率无关, Wu Guoqing, Wang Meigang, Chen Shouhu, et al. Er-
ror analysis and correction method of underwater vessel
具有优越的低频噪声测量性能。理论分析计算和仿 radiated noise measurement by vertical array and single
真计算得出,各向同性环境噪声中相同孔径下矢量 hydrophone[J]. Acta Acustica, 2007, 32(5): 398–403.
阵的空间增益相较于声压阵高4.8 dB。本文针对水 [6] Humphrey V, Brooker A, Dambra R, et al. Variability
of underwater radiated ship noise measured using two
下航行器低速航行时,主要能量分布于100∼400 Hz
hydrophone arrays[C]// OCEANS 2015-Genova. IEEE,
频段的低频段辐射噪声测量需求,结合低噪声目标 2015.