
Page 190 - 《应用声学》2025年第1期
P. 190
186 2025 年 1 月
90O
1.0
120O 60O 2 低频段低辐射噪声测量系统设计
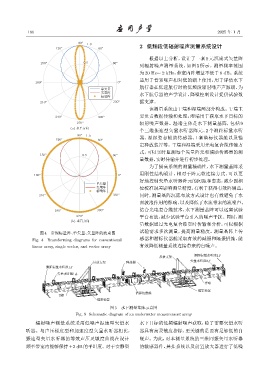
根据以上分析,设计了一套 9 元沉底式矢量阵
150O 0.5 30O
列辐射噪声测量系统,如图 5 所示。测量频率范围
为20 Hz∼ 2 kHz,带宽内阵增益不低于8 dB。系统
适用于背景噪声相对低的湖上使用,用于评估水下
180O 0O
航行器在低速航行时的低频段辐射噪声声源级,为
ӭᅺ᧚
ᅺ᧚ 水下航行器的声学设计、降噪控制设计提供试验数
ಖ᧚
210O 330O 据支撑。
该测量系统由干端和湿端两部分构成。干端主
240O 300O 要负责数据传输和处理,湿端用于获取水下目标的
270O 辐射噪声数据。湿端主体是水下测量基阵,包括 9
(a) ඵࣱவՔ
个三维振速型矢量水听器阵元、2 个测距标量水听
90O 1.0
120O 60O 器、温深姿态辅助传感器、1 套潜标仪器舱以及锚
定释放装置等。干端和湿端采用光电复合缆传输方
式,可以实时监测每个矢量阵元和辅助传感器的测
150O 0.5 30O
量数据,实时传输并进行初步处理。
为了提高系统的测量精确性,水下测量基阵采
用刚性结构设计,相对于阵元软连接方式,可以更
180O 0O
好地控制矢量水听器阵元的间距和姿态,减少因相
ӭᅺ᧚
ᅺ᧚ 位校准误差影响测量精度,有利于获得有效阵增益。
ಖ᧚
210O 330O 同时,测量基阵沉底布放方式设计也有效避免了水
面波浪作用的影响,以及降低了水流带来的流噪声。
240O 300O 结合光电复合缆技术,水下测量基阵可以远离试验
270O 平台布放,减少试验平台引入的噪声干扰。同时,测
(b) ۇᄰவՔ
量数据通过光电复合缆实时传输和分析,可以根据
图 4 常规标量阵、单矢量、矢量阵的波束图 试验需求多次测量,提高测量精度。测量基阵上传
Fig. 4 Beamforming diagrams for conventional 感器和潜标仪器舱采取有效的减振和隔振措施,能
linear array, single vector, and vector array 有效降低测量系统连接带来的自噪声。
Վஊஃ ᡰಖ᧚ඵզ٨2#
Վஊஃ ᧖ஊ٨ ᅺ᧚ඵզ٨9#
ᡰಖ᧚ඵզ٨1#
ᅺ᧚ඵզ٨1#
๏ု
ᩳࠀᜉᎶ
ಖ́٨ᓎ
๏ု
ᩳࠀᜉᎶ
图 5 水下测量基阵示意图
Fig. 5 Schematic diagram of an underwater measurement array
辐射噪声测量系统采用低噪声振速型矢量水 水下目标的低频辐射噪声获取,除了需要矢量水听
听器。与声压梯度型和加速度型矢量水听器相比, 器具有高灵敏度指标,更关键的是要有足够低的自
振速型矢量水听器的等效声压灵敏度曲线在设计 噪声。为此,对本测量系统的三维同振矢量水听器
频率带宽内能够保持±2 dB的平坦度。对于安静型 的敏感器件、悬挂系统以及前置放大器进行了低噪