
Page 191 - 《应用声学》2025年第1期
P. 191
第 44 卷 第 1 期 胡园等: 沉底式矢量水听器阵辐射噪声测量系统 187
声设计。其中,矢量水听器前置放大电路要求其等 色。该采集系统选用主机 PXIe-1082DC、控制器
效输入噪声要低于矢量水听器的敏感器件输出噪 PXIe-8880以及3 块同步采集卡 PXIe-4499,构成 48
声。矢量水听器是由声压传感器和振速传感器组合 通道数据采集,可完成 9 个矢量水听器和 2 个标量
而成,其中,振速传感器采用动圈式速度计,内阻较 水听器信号的采集。PXIe-4499 采集卡专为高通道
小,电压噪声在电路总噪声中起主导作用。而声压 数声音和振动应用而设计,具有 nV 级的本底噪声,
传感器是由高阻抗的压电材料制成,其阻抗很高,且 可以满足低频弱信号的采集需求。
随频率变化。在低频段 (约 300 Hz 以下),阻抗逐渐
变大。在阻抗较大时,必须考虑电流噪声的影响。为 3 矢量水听器阵测量系统性能湖上测试
了最大化获取声压信号且不影响传感器的接收灵
敏度,放大电路采用了分离器件 JFET 和集成运算 2022 年 10 月在千岛湖进行了矢量水听器阵测
放大器的复合放大结构。N 沟道的 JFET 管构成差 量系统性能测试。试验区域开阔,湖面平静,湖底
分输入,作为放大电路的第一级。N 沟道的 JFET, 平坦。试验平台远离航道,周围无机动船干扰。由
其栅极偏置电流非常小,在输入端产生很小的直流 BK8106 标准水听器测试,在 20 Hz∼2 kHz 频率范
电压。矢量通道的输出阻抗相对较小,电流噪声对 围内,湖上环境噪声总声级约为 106 dB。试验水域
电路总噪声的贡献较小。因此,选择电压噪声较小 水深 43 m,为保证矢量水听器阵的水平姿态来更好
的运算放大器即可实现低噪声前置放大设计。经低 地测量系统性能,水下测量基阵两端吊架固定绳缆,
噪声设计的振速型矢量水听器,在真空罐中测试的 吊放于试验平台月池水下 36 m 位置。宽频带声源
自噪声低于40 dB@1 kHz。 (UW350) 声源吊放于水面以下 10 m 处,距离水下
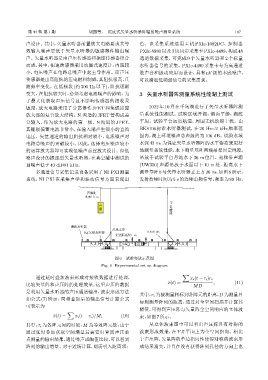
多通道信号采集记录设备采用了 NI PXI 测量 测量基阵 8 号矢量水听器正上方 26 m,如图 6 所示。
系统,NI PXI 在采集声学和振动信号方面表现出 发射持续时间为5 s的连续单频信号,频率为80 Hz。
ܦູᡰ
ඵ᭧10 m
Վ፤35 m
ܦ
ູ
ᡰඵզ٨
Վஊஃ
8#ᅺ᧚ඵզ٨ BK8106
ஃᡰअ1 m
图 6 试验布放示意图
Fig. 6 Experimental set up diagram
∑
通过延时叠加波束形成对接收数据进行处理, x i (t − τ i )r i
比较矢量阵和声压阵的处理效果,这里声压阵数据 ˆ x(t) = MD , (11)
是利用矢量水听器的声压通道输出,波束形成方法
其中,r i 为被测量目标到各阵元的距离,D 为测量目
如公式 (7) 所示,同相叠加后的输出信号计算公式
标到测量阵列的距离,通过对全空间扫描并计算其
可表示为
幅值,可得到声压阵与矢量阵全空间响应的立体波
∑
ˆ x(t) = x i (t − τ i )/M, (10) 束,如图7所示。
其中,τ i 为各阵元间的时延,M 为等效阵元数,由于 从立体波束图中可以看出声压阵具有对称的
通过延时叠加获取空间增益后需要归算回声压单 波束形成效果,在 Y Z 平面上为全空间指向。相比
点测量的输出结果,通过噪声或幅值比较,可以看到 于声压阵,矢量阵的单边指向性使得对称的波束形
阵列的输出增益。对于近场计算,则需引入距离项: 成结果消失,并且在没有获得阵列孔径的方向上也