
Page 222 - 201805
P. 222
804 2018 年 9 月
0.02 MPa,量程:0∼1 MPa)。对于同一个喷嘴,孔 TTL in触发输入端相连,可以使空化云的高速摄影
板入口压力和孔口流速是一一对应的。换能器变 数据与水听器测得的声压数据同步。
幅杆从耦合腔天花板上的窗口插入,通过法兰与
耦合腔连接固定,产生水力空化的喷嘴与耦合腔可 3 声-流耦合空化高速摄影及噪声分析
分离。为加快排除自来水中多余气泡的干扰,耦合
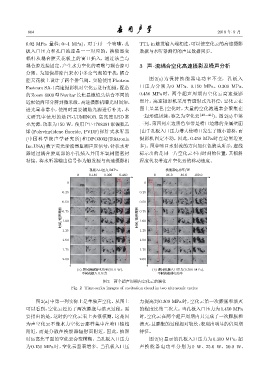
腔天花板上设计了两个排气阀。实验使用 Photron 图 2(a) 为保持换能器电功率不变, 孔板入
Fastcam SA-1高速摄影机对空化云进行拍摄。配备 口压力分别为 0 MPa、0.150 MPa、0.300 MPa、
的 Zoom 6000 型 Navitar 长焦显微镜头结合不同的 0.450 MPa 时,两个超声周期内空化云高速摄影
适配镜筒可分辨到微米级。高速摄影机曝光时间短, 照片。高速摄影机采用背透射式光补偿,空化云在
进光量非常小,使用时需要辅助光源进行补光,本 图上呈黑色 (空化时,大量的空化泡通常会聚集在
文研究中使用的是 PI-LUMINOR 高亮度 LED 常 一起形成团簇,称之为空化云 [40−41] )。图 2(a) 中第
亮光源,功率为150 W。使用PT-1708381聚偏氟乙 三列、第四列左边黑色窄带是喷口边缘的金属壁面
烯 (Polyvinylidene fluoride, PVDF) 探针式水听器 (由于孔板入口压力增大使喷口发生了微小前移,而
(中国科学院声学研究所) 和 DPO3032(Tektronix 摄影机固定不动,因此,0.450 MPa 时左边黑边更
Inc.USA)数字荧光示波器监测声压信号,针状水听 多)。图中喷口水射流的方向如红色箭头所示,虚线
器通过耦合腔底部的小孔插入并用环氧树脂密封 标示出的是同一片空化云不同时刻的位置,其倾斜
粘接。将水听器输出信号作为触发源与高速摄影机 程度代表着这片空化云的移动速度。
ߘКԍҧ/MPa ૱ᑟ٨ႃҪဋ/W
0 0.150 0.300 0.450 0 25.0 50.0 100.0
0 0
0.25 0.25
0.50 0.50
ᫎ/ᡔܦևర 0.75 ᫎ/ᡔܦևర 0.75
1.00
1.00
1.25 1.25
1.50 1.50
1.75 1.75
2.00 2.00
(a) ᄱՏ૱ᑟ٨ႃҪဋ(50.0 W) (b) ᄱՏߘКԍҧ(0.300 MPa)
ˀՏߘКԍҧ ˀՏ૱ᑟ٨ႃҪဋ
图 2 两个超声周期内空化云的演化
Fig. 2 Time-series images of cavitation cloud in two ultrasonic cycles
图2(a)中第一列实际上是单独声空化。从图上 力提高到 0.300 MPa 时,空化云第一次膨胀和溃灭
可以看到,空化云经历了两次膨胀与溃灭过程。需 的程度比第二次大。当孔板入口压力为 0.450 MPa
要指出的是,这时的空化云看上去很模糊,这是因 时,空化云在两个超声周期内只完成了一次膨胀和
为声空化云不像水力空化云那样集中在喷口轴线 溃灭,且膨胀的过程相对较长,表现出明显的倍周期
附近,而是分散在换能器辐射面附近,因此,拍照 特征。
时远离焦平面的空化云会变模糊。当孔板入口压力 图 2(b) 显示的孔板入口压力为 0.300 MPa,超
为 0.150 MPa 时,空化云显著增多。当孔板入口压 声换能器电功率分别为 0 W、25.0 W、50.0 W、