
Page 28 - 201903
P. 28
310 2019 年 5 月
板的总动能较小,即局域化控制方法增加了平板的 尼较大时,高频段平板仅在激振器附近区域振动。
等效机械阻抗。通过正则化技术可以在最大化平均 因此为兼顾高频播放,在平板的左右两区域分别布
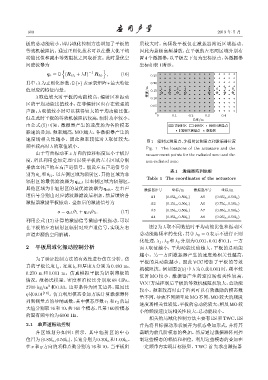
动能比值和减小等效阻抗之间取折衷。此时最优空 置4个激振器,以平板左下角为坐标原点,各激振器
间滤波器为 坐标如表1所示。
{ }
−1
+ λI) , (16)
q o = Q (R Ω t R Ω r 0.25
其中,λ为正则化参数,Q {∗}表示求矩阵∗最大特征 0.20
值对应的特征向量。 ࠕए/m 0.15 1 2 3 4 5 6 7 8
λ 取值较大时平板的动能较高,辐射区和振动 0.10
区的平均动能比值较小,在非辐射区也存在较强的 0.05
声源;λ 取值较小时可以获得较大的平均动能比值,
0
但是此时平板的等效机械阻抗较高,辐射功率较小。 0 0.1 0.2 ᫂ए/m 0.3 0.4
由公式 (5) 可知,激振器产生的速度场为各阶模态 ᭤ᣣ࠱ӝ ᣣ࠱ӝ ᣣ࠱ӝ᧚ག
振速的叠加,频率越高,MO 越大,各激振器产生的 ᭤ᣣ࠱ӝ᧚ག ༏٨
速度场相关性越小。因此频率较低时 λ 取值较大, 图 1 辐射区测量点、非辐射区测量点和激振器位置
频率较高时λ的取值较小。 Fig. 1 The locations of the actuators and the
由于弯曲振动在z 方向的位移幅度远小于板厚 measurement points for the radiated zone and the
度,所以利用叠加定理可以使平板的左右区域分别 non-radiated zone
播放立体声的左右声道信号。假设左右声道信号分
表 1 激振器阵列坐标
别为 θ L 和θ R 。以左侧区域为辐射区,其他区域为非
Table 1 The coordinates of the actuators
辐射区的最优滤波器为 q oL ;以右侧区域为辐射区,
其他区域为非辐射区的最优滤波器为 q oR 。左右声 激振器序号 坐标/m 激振器序号 坐标/m
道信号分别由对应滤波器滤波后相加,然后馈给各 A1 (0.05l a, 0.50l b ) A5 (0.65l a, 0.50l b )
激振器激励平板振动。叠加后的激励信号为 A2 (0.15l a, 0.50l b ) A6 (0.75l a, 0.50l b )
s = q oL θ L + q oR θ R . (17) A3 (0.25l a, 0.50l b ) A7 (0.85l a, 0.50l b )
A4 (0.35l a, 0.50l b ) A8 (0.95l a, 0.50l b )
利用公式 (17) 计算的激励信号激励平板振动,可以
在平板的左右辐射区辐射对应声道信号,实现左右 图 2 为 λ 取不同数值时平均动能比值和振动区
声道声源的空间解耦。 总动能随频率的变化,其中 λ 0 = 0 表示不进行正则
化处理,λ 1 、λ 2 和 λ 3 分别为 0.001、0.01 和 0.1。一方
2 平板局域化振动控制分析 面 λ 取值越小,平均动能比值越大,平板的总动能
越小。另一方面激振器产生的速度场相关性越高,
为了验证控制方法的有效性进行仿真分析。仿
平板的总动能越小。因此 VCC 增加了平板的等效
真的平板长度 l a 、宽度 l b 和厚度 h 分别为 0.480 m、
机械阻抗。例如图 2(b) 中 λ 为 0 或 0.001 时,频率较
0.270 m 和 0.001 m。仿真模拟平板为铝制薄板的
低时 MO 较小,激振器产生的速度场相关性较高,
情况,故杨氏模量、密度和泊松比分别取 68 GPa、
VCC方法控制后平板的等效机械阻抗较大,总动能
2700 kg/m 和 0.33。边界条件为固支边界,阻尼比
3
较小。频率较高时由于阵列可以有效激励的模态数
η 取 0.01 [16] 。仿真利用模态叠加方法计算激振器阵
量不同,导致不同频率处MO不同,MO较大的频段
列到测量点的导纳函数,其中模态序数r 1 和r 2 的最
速度场相关性较低,平板的总动能较大;相反MO较
大值分别取16和10,共160个模态,且第160阶模态
小的频段速度场相关性较大,总动能较小。
的固有频率约为6000 Hz。
相关的局域化控制方法主要有ES和TWC。ES
2.1 单声道振动控制 首先将目标振动形状展开为模态叠加形式,并将其
各区域划分如图 1 所示,其中辐射区的中心 截断为前几阶模态的叠加。然后通过激振器阵列控
位置为 (0.85l a , 0.50l b ),长宽分别为 0.30l a 和1.00l b 。 制这些模态的幅值和相位,利用这些模态的叠加在
在x和y 方向的采样点数分别为16和10。当平板阻 一定频带内实现目标振型。TWC 首 先求出激振器