
Page 288 - 应用声学2019年第4期
P. 288
748 2019 年 7 月
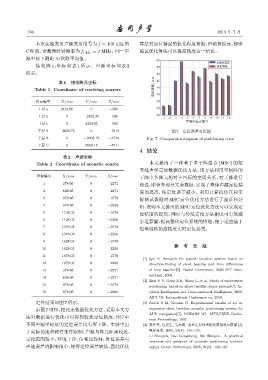
本次实验发射声源发射信号为 f = 100 kHz的 算法对定位精度的优化程度有限,但确有提高,能够
CW波,计数器时钟频率为 f CLK = 2 MHz。同一声 验证优化算法可以提高精度这一结论。
源坐标下测距10次取平均值。 60
͖ӑካข
接收阵元坐标如表 1 所示。声源坐标如表 2 55 ͖ӑካข
所示。 50
ࠀͯឨࣀ/mm 40
表 1 接收阵元坐标 45
Table 1 Coordinate of receiving sensors 35
阵元编号 X/mm Y /mm Z/mm 30
上层 a 2451.05 0 −585 25
上层 b 0 −2452.35 −586 20 1 2 3 4 5 6 7 8 9 10 11 12
ܦູگಖགᎄՂ
上层 c 0 2459.85 −600
下层 A −2608.75 0 −4513 图 7 定位误差对比图
下层 B 0 −2608.15 −4748 Fig. 7 Comparison diagram of positioning error
下层 C 0 2618.15 −4711
4 结论
表 2 声源坐标
Table 2 Coordinate of acoustic source 本文提出了一种基于多子阵组合 (MSC) 的短
基线声学定位数据优化方法,该方法利用空间阵的
声源编号 X/mm Y /mm Z/mm 子阵中各阵元相对于目标的空间关系,对子阵进行
1 378.05 0 −2271 筛选,即舍弃部分冗余数据,实现了整体声源定位精
2 628.05 0 −2271 度的提高,使定位误差减小。利用计算机仿真和实
3 878.05 0 −1578
际测试数据对 MSC 定位优化方法进行了验证和分
4 878.05 0 −2266
析,表明本文提出的MSC定位优化方法可以实现定
5 1128.05 0 −1578
位精度的提高,同时与传统定位方法相比可有效减
6 1128.05 0 −2266
小运算量,提高整体定位系统的性能,便于适应基于
7 1378.05 0 −1578
短基线阵的高精度实时定位场景。
8 1378.05 0 −2266
9 1628.05 0 −1578
参 考 文 献
10 1628.05 0 −2266
11 1878.05 0 −1578
[1] Qin Z. Research for passive location system based on
12 1878.05 0 −2266 direction-finding of short baseline and time differences
13 378.05 0 −2271 of long baseline[C]. Radar Conference, 2009 IET Inter-
national, 2009.
14 628.05 0 −2271
[2] Zhai Y Y, Gong Z B, Wang L, et al. Study of underwater
15 878.05 0 −1578
positioning based on short baseline sonar system[C]. Ar-
16 878.05 0 −2266 tificial Intelligence and Computational Intelligence, 2009.
AICI ’09. International Conference on, 2009.
定位结果如图7所示。 [3] Smith S M, Kronen D. Experimental results of an in-
由图 7可知,相比无数据优化方法,采用本文方 expensive short baseline acoustic positioning system for
AUV navigation[C]. OCEANS ’97. MTS/IEEE Confer-
法对数据进行优化可以得到较优定位精度,图 7 中
ence Proceedings, 1997.
不同声源坐标处的定位误差均有所下降。实验中由 [4] 李守军, 包更生, 吴水根. 水声定位技术的发展现状与展望 [J].
于实际场地和硬件条件限制,声源与阵元距离较近, 海洋技术, 2005, 24(1): 130–135.
LI Shoujun, Bao Gengsheng, Wu Shuigen. A practical
定位范围较小,环境干净,信噪比较好,时延误差与
overview and prospect of acoustic positioning technol-
声速误差的影响很小,使得定位误差较低,因此优化 ogy[J]. Ocean Technology, 2005, 24(1): 130–135.