
Page 286 - 应用声学2019年第4期
P. 286
746 2019 年 7 月
z 比,本文提出的MSC方法可有效提高边缘区域定位
精度;同时,在传统方法定位精度较优的区域,本文
c b 优化方法亦可保持较高精度,可见优化筛选并不会
a
筛除有效数据。
R
x
ᓈᛡ٨ ឴ԩਫ਼దᡰ
B
C
A
ѳߕጸՌ
ᝍካਫ਼దߕᄊ ω
y
图 2 立方体阵示意图 −
ᝠካਫ਼ద ω ᄊࣱکϙ ω
Fig. 2 Schematic diagram of cubic array
−
ᝠካՊߕ ω-ω
R 为球形半径,r 为阵元所在平面截面圆半
径, 阵元坐标分别为 (x A , y A , z A )、(x B , y B , z B )、 Ꮆኙᤥ᫃ᬍ η
(x C , y C , z C )、(x a , y a , z a )、(x b , y b , z b )、(x c , y c , z c ),航
᠇
−
行器的真实位置坐标为 (x 0 , y 0 , z 0 ),解算位置坐标 Ѽࠀࣱکϙ ω ᠇
为(x, y, z)。
−
−
设球形半径 R = 200 m,接收信号功率均大 ω-ω తܸϙኙᬔ ω-ω త࠵ϙኙᬔ
于检测门限,检测门限大于噪声功率,取球体
覆盖空间内最大声速误差为 0.2 m/s,时延误差
N ኙᬔ˔ܸ̆η
∆t i ∼ U(0, 0.006t ),同一声源坐标下测距 100 次取
′
i
平均值,取筛选门限η = 3,即每次定位从15个定位 Y
数据中筛除3个定位数据。 ѻᬔᄱऄࠀͯᚸ
Ռࣳ४҂తጼࠀͯፇ౧
根据第2节所述,方法流程如图3所示。
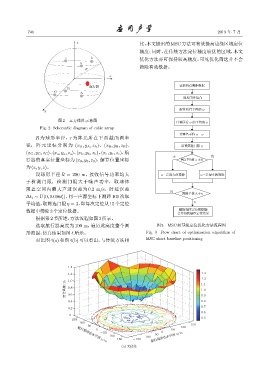
选取航行器高度为 100 m,遍历此高度整个圆 图 3 MSC 短基线定位优化方法流程图
形范围,仿真结果如图4所示。 Fig. 3 Flow chart of optimization algorithm of
对比图 4(a) 和图 4(b)可以看出,与传统方法相 MSC short baseline positioning
1.4
1.2 1.3
1.2
1.0
ᇊս䈟ᐞ/m 0.8 1.1
1.0
0.6
0.9
0.4 0.8
1.1 1.1 1.2 0.7
0.2 1.3 1.2 1
0.9 1
1.1 0.8 0.8 0.9 1.1 0.6
0 1 0.8 0.6 0.7 1 1.2
0.6
150 1.2 0.9 1 0.7 0.6 0.7 0.6 0.5
100 1.2 0.9 0.6 0.7 0.8 0.9 1.1
50 1.1 0.8 100 150
0.9 1
1
0 1.1 1.2 50
-50 1.2 1.2 0
-50
-100 -100 ᓈᛡ٨ਫ਼ښඵࣱ᭧ x/m
-150 -150
ᓈᛡ٨ਫ਼ښඵࣱ᭧ y/m
(a) ͖ӑ