
Page 150 - 应用声学2019年第5期
P. 150
902 2019 年 9 月
2.2 实验步骤 为(0.76 m, 2.01 m, 0.70 m)。在直达波到达后50 ms
本文选择函数形式如下的正弦扫频信号作为 内进行搜寻,分别利用设置阈值的方式挑选出直达
激励信号 [11] : 波后的 10 个到达信号,选择这 10 个的到达时间组
[ ]
ω 1 T ( t ) 成 10×4 的一组数据,经过匹配算法分别求得声源
s(t) = sin e T ln(ω 2 /ω 1 ) − 1 , (22)
ln(ω 2 /ω 1 )
坐标为(1.46 m, 2.02 m, 0.72 m)、(−3.05 m, 1.96 m,
根据文献 [11],这种信号比较适合于求解系统冲激
0.82 m)、(0.83 m, 1.97 m, 3.45 m)、(0.77 m, 2.03 m,
响应信号。根据频率响应,设定 w 1 为500 Hz,w 2 为
−0.94 m)、(0.40 m, 1.95 m, 1.13 m)、(0.94 m,
5000 Hz,T 为信号时长,设置为0.01 s。
1.39 m, −1.46 m)、(1.09 m, −0.42 m, −2.03 m)(由
Y (ω)
H(ω) = , (23) 于后 3 个峰值到达时间不满足间隔小于阵列最大间
S(ω)
设置采样率为44.1 kHz,利用频域接收信号Y (ω)和 距所对应的时间值,因此没有产生声源坐标)。绘制
频域发射信号 S(ω) 经过公式 (23) 计算得到的四个 以上坐标在x、z 方向的投影如图11所示。
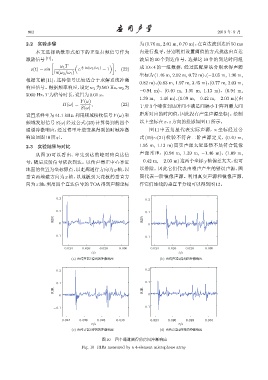
通道冲激响应,经过傅里叶逆变换得到的时域冲激 图 11 中五角星代表实际声源,× 坐标经过公
响应如图10所示。 式 (19)∼(21) 检验不符合二阶声源定义,(0.40 m,
2.3 实验结果与对比 1.95 m, 1.13 m) 离实声源太近显然不是符合镜像
从图 10 可以看出,率先到达的峰对应直达信 声源常理,(0.94 m, 1.39 m, −1.46 m)、(1.09 m,
号,随后反射信号依次到达。以传声器正中心靠近 −0.42 m, −2.03 m)这两个坐标y轴偏差太大,也可
地面的位置为坐标原点,以走廊通行方向为y 轴,以 以排除。因此它们代表由噪声产生的错误声源,圆
垂直两墙壁方向为 x 轴,以地板到天花板的垂直方 圈代表一阶镜像声源。利用真实声源和镜像声源,
向为 z 轴,利用四个直达信号的 TOA得到声源坐标 作它们连线的垂直平分线可以得到图12。
0.2 0.2
0.1
0.1
RIR RIR
0
0
-0.1 -0.1
0.024 0.026 0.028 0.030 0.024 0.026 0.028 0.030
t/s t/s
(a) ႀ͜ܦ٨1४҂ᄊф༏־ऄ (b) ႀ͜ܦ٨2४҂ᄊф༏־ऄ
0.2 0.2
0.1 0.1
RIR RIR
0 0
-0.1 -0.1
0.024 0.026 0.028 0.030 0.024 0.026 0.028 0.030
t/s t/s
(c) ႀ͜ܦ٨3४҂ᄊф༏־ऄ (d) ႀ͜ܦ٨4४҂ᄊф༏־ऄ
图 10 四个通道测得的房间冲激响应
Fig. 10 RIRs measured by a 4-element microphone array