
Page 103 - 《应用声学》2020年第1期
P. 103
第 39 卷 第 1 期 陈建新等: 基于子带信号瞬时频率的特征提取及其在车型分类中的应用 99
解析信号s a (t)的极坐标表示形式如下: 表达式如下:
t 0 +τ
∫
2
s a (t) = |s a (t)| e jθ(t) , (3) (f i (t)a (t))dt
i
IF = t 0 ∫ t 0 +τ , (12)
其中,s a (t) 和 θ(t) 分别是信号的幅度包络和解析相 2
(a (t))dt
i
位,其中: t 0
其中,τ 为一帧信号的长度,t 0 为该帧信号的起始
√
2
2
|s a (t)| = s (t) + s (t). (4)
h 点,f i (t) 为第 i 个子带信号的瞬时频率,a i (t) 为第 i
然后可以得到信号的瞬时相位: 个子带信号的瞬时幅度值。
θ(t) = tan −1 (s h (t)/s(t)). (5) 3 特征提取
通过对相位函数进行求导获得其瞬时频率:
车辆噪声信号成分复杂,不能直接对其进行瞬
d
′
IF = (θ(t)) = θ (t). (6) 时频率估计,需要将其分解成一系列的窄带信号,常
dt
用的做法是使用一组相互重叠的窄带滤波器组进
式 (5) 的相位角 θ(t) 存在相位卷绕问题,不能 行处理。本文使用能够模拟人听觉系统的耳蜗滤波
直接用于瞬时频率估计,需要将其展开,但相位展开 器组 [7] ,相关研究发现,在耳蜗滤波器的每个中心
算法通常是不准确的,因此会影响到瞬时频率估计。 频率中,从基底膜的底部到顶部,行波发生快速相
为了解决这个问题,使用傅里叶变换性质在没有显 位移动 [8] ,这种快速的相位变化可以通过其一阶导
式求出θ(t)的情况下直接计算瞬时频率。 数瞬时频率来捕获,文献[9]证明了这一观点。此外,
对式 (3) 两边同时取对数,并对时间求导数,可 目前模拟耳蜗滤波的听觉模型主要用于研究其在
以得到如下式子: 不同中心频率下的幅度响应,虽然效果显著,但并不
能完全等同于听觉系统对声音的处理过程,尤其是
lg s a (t) = lg |s a (t)| + jθ(t), (7)
对相位的处理。因此研究了不同尺度下中心频率分
s (t) = d lg |s a (t)| + jθ (t), (8)
′
a
′
s a (t) dt 布以及不同带宽下的耳蜗滤波器组对所提取特征
性能的影响。
其中,s (t) 是 s a (t) 的时间导数,θ (t) 是 θ(t) 的时间
′
′
a 耳蜗滤波器的时域表达式定义为
导数,即瞬时频率,如式(9)所示:
1 ( t − b ) α [ ( t − b )]
{ } ψ a,b (t) = √ exp − 2πf L β
s (t) a a a
′
θ (t) = Im a , (9)
′
s a (t) [ ( t − b ) ]
× cos 2πf L + θ u(t − b), (13)
其中,Im{·}表示复数的虚部。可以用傅里叶变换的 a
其中,α > 0,β > 0,用来确定耳蜗滤波器在频域中
微分性质来计算解析信号的导数:
的形状和带宽,通常α 取3,β 取0.2或0.035;u(t)是
s (t) = jF −1 {wS A (jw)} , (10)
′
a
-70
其中,F −1 表示傅里叶反变换,S A (jw) 是 s a (t) 的傅
-80
里叶变换,因此瞬时频率可以表示为
{ −1 } -90
F {wS (jw)} ࣨए/dB
′
θ (t) = Re A , (11) -100
′
F −1 {S A (jw)}
其中,Re{·}表示复数的实部。因为所使用的瞬时频 -110
率计算并不涉及到解析相位的计算,所以其不受相 -120
0 1 2 3 4 5 6 7 8
位卷绕的影响,性能更加稳定。 ᮠဋ/kHz
此外,为了进一步精确地表示子带信号的瞬时
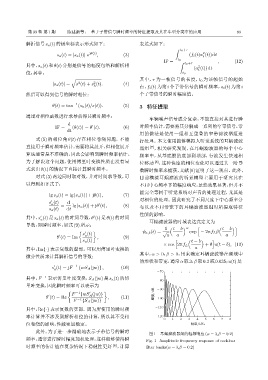
图 1 耳蜗滤波器组的幅频响应 (α = 3,β = 0.2)
频率,通常进行瞬时幅度加权处理,这样能够使得瞬 Fig. 1 Amplitude frequency response of cochlear
时频率的估计值在复杂情况下稳健性更好 [6] ,计算 filter banks(α = 3,β = 0.2)