
Page 78 - 《应用声学》2020年第1期
P. 78
74 2020 年 1 月
式 (4) 中,L 是代表发射线圈 T 到接收线圈 R 的距 点地层电导率的场点坐标的函数 [14] 。
离;θ 是地层倾角;γ 是仪器方位角;k v 、k h 为电磁传 利 用 文 献 [1] 中 给 出 低 频 近 似 为 k h L → 0,
√
2
播系数,其中k v = k v (x) = iωµσ v (x) + ω µε(x), k v S → 0,n > 1,带入式(4)得到
√
2
k h = k h (x) = iωµσ h (x) + ω µε(x),x 表示是场
2 2
2
2
2
h x x H M,x x ′′ sin γ sin γ−cos γ cos θ 1 cos γ 2
′′
2 2 2 2 2 2
h
y H M,y y cos γ cos γ−sin γ cos θ 1 sin γ ζλ
′′ ′′
y
2
y ωµσ h sin γ cos γ sin γ cos γ(cos θ+1) 0 2
′′ ′′
x
h H M,x y − sin γ cos γ 2 (1 − ζ) , (5)
=Im = sin θ
2
h
z H M,z z 8πL 0 − sin θ − 2 0
′′ ′′
z −1
z 0 0
x ′′ ′′ 0 − cos γ cos θ sin θ
h H M,x z
h z 0 0 2
′′ ′′
y H M,y z 0 sin γ cos θ sin θ
2
其 中, k v S = k h Lζ, S = Lζλ, ζ = σ v = σ h /λ . (10)
√
1 2 σ h
2
cos θ + sin θ,λ = 。 最后,利用式 (4) ∼ 式 (10) 及三维感应测井数
λ 2 σ v
由式(5),解得倾角θ、方位角γ、水平电导率σ h 、 据,处理得到地层倾角 θ、方位角 γ、水平电导率 σ h 、
垂直电导率σ v 四个参数: 垂直电导率σ v 四个参数。
{ z y 2
1 x y z 2h (h ) 1.2 测量系统主控模块设计
z
x
σ h = h + h + 3h +
z
y
x
z 2
z 2
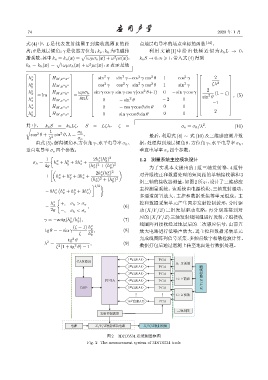
4g (h ) + (h ) 为了实现本文提出的 1 组三轴发射器、4 组针
y
x
[( z y 2 )
2h (h ) 对井眼校正和数据处理的短间距的单轴接收器和 3
z
x
z
y
x
± h + h + 3h +
x y z z 2 z 2
(h ) + (h ) 组三轴的接收器测量,如图 2所示,设计了三维感应
x
y
] 1/2 }
x
y
− 8h z z ( h + h + 3h z z ) 主控测量系统。该系统由电源模块、三轴发射驱动、
y
x
多通道前置放大、主控和数据采集等单元组成。主
{
h z z +, σ h > σ v 控和数据采集单元产生同步发射控制波形,分时驱
− , (6)
2g 动 (X/Y /Z) 三组发射驱动电路,再分别连接到对
−, σ h < σ v
应的 (X/Y /Z) 三轴发射线圈组进行发射,7 组接收
z
z
γ = −actg(h /h ), (7)
y
x
(ζ − 1) h z x 线圈阵列接收经过地层后的二次感应信号,由前置
tg θ = − sin γ y , (8) 放大电路进行低噪声放大,送主控和数据采集单元
ζ h x
2
tg θ 完成线圈阵列信号采集、多频点数字相敏检波计算、
2
λ = , (9) 数据打包后通过遥测上传至地面进行数据处理。
2
2
ζ (1 + tg θ) − 1
#
1 ᰴᤴAD PGA
CANᤰ
A: X Ғஊ
#
2 ᰴᤴAD PGA
#
3 ᰴᤴAD PGA
B: Y Ғஊ X⊳Y⊳Z ଌஆጳڔ
#
FPGA 4 ᰴᤴAD PGA
#
DSP 5 ᰴᤴAD PGA
C: Z Ғஊ
#
16 ᰴᤴAD PGA
̄ጟ҉ए
ԧ࠱҄ฉॎ
ႃູ X⊳Y⊳Zԧ࠱үႃ X⊳Y⊳Zԧ࠱ጳڔ
图 2 3DIT6531 系统测量框图
Fig. 2 The measurement system of 3DIT6531 tools