
Page 58 - 《应用声学》2020年第6期
P. 58
852 2020 年 11 月
4 1.4
3
1.3
2 1 1.2
ԍܦү/10 5 Pa -1 0 ӧय़/mm 1.1
1.0
-2
0.9
-3
0.8
-4
-5 0.7
0 0.5 1.0 1.5 2.0 2.5 3.0 0 0.5 1.0 1.5 2.0 2.5 3.0
ᫎ/ms ᫎ/ms
(a) үܦԍజጳ (b) ӧय़ԫӑజጳ
8 0
6
4 -5
2 -10
ܦԍ/Pa 0 ॆʷӑᮠ៨ (arb. units)
-2 -15
-4
-20
-6
-8 -25
0 0.5 1.0 1.5 2.0 2.5 3.0 0 5 10 15
ᫎ/ms ᮠဋ/MHz
(c) ᮕܦԍజጳ (d) ᮠ៨జጳ
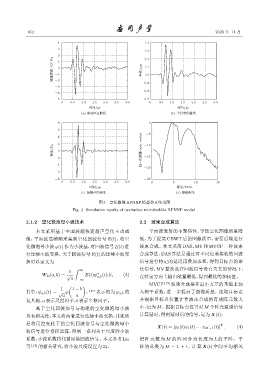
图 3 空化微泡 RPNNP 模型仿真结果图
Fig. 3 Simulation results of cavitation microbubble RPNNP model
2.1.2 空化微泡母小波技术 2.2 波束合成算法
本文采用基于平面波超快速超声空化主动成 平面波发射的不聚焦性,导致空化图像质量降
像,平面波高帧频采集到空化回波信号 E(t),将空 低,为了提高 CBWT 后的图像质量,需要后端进行
化微泡母小波φ(t) 作为小波基,对回波信号E(t)进 波束合成。本文采用 DAS、MV 和 MVCF 三种波束
行连续小波变换。关于回波信号E(t)的连续小波变 合成算法,DAS算法是通过对不同信道接收的回波
换可以定义为 信号进行特定的延迟再叠加求和,得到目标点的聚
焦信号;MV 算法是在回波信号没有失真的情况下,
∫
1 ∞
W E (a, b) = √ E(t)ψ ∗ (t)dt, (3) 在特定方向上输出能量最低,得到最优的加权值。
a,b
a
−∞
MVCF [19] 波束合成是在最小方差的基础上加
( )
1 t − b
其中,ψ a,b (t) = √ φ ,“*” 表示的为 φ a,b 的 入相干系数,进一步提高了图像质量。选取目标点
a a
复共轭,a表示尺度因子,b表示平移因子。 并根据目标点位置计算波束合成的有效阵元数大
基于空化回波信号与构建的空化微泡母小波 小,记为M。根据目标点位置对M 个阵元通道信号
具有相关性,本文将两者进行连续小波变换,其实质 计算延时,得到延时后的信号,记为X(t):
是将尺度变化下的空化回波信号与空化微泡母小 T
X(t) = [x 0 (t)x 1 (t) · · · x M−1 (t)] . (4)
波信号进行卷积运算,得到一系列关于尺度的小波
系数,小波系数将代替原始回波信号。本文参考Liu 把阵元数为 M 的阵列分为长度为 L 的子阵,子
等 [14] 的相关研究,将小波尺度设置为23。 阵的总数为 M − L + 1,计算 X(t) 空间平均相关