
Page 86 - 《应用声学》2020年第6期
P. 86
880 2020 年 11 月
图 7 平面信息码
Fig. 7 Flat information code
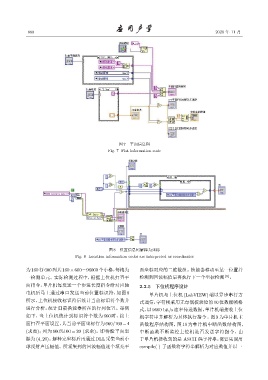
图 8 位置信息码解释为坐标
Fig. 8 Location information codes are interpreted as coordinates
为160行600列共160 × 600=96000个小格,每格为 面坐标对应的二维数组。换能器移动至某一位置并
一检测单元。实际检测过程中,根据上位机扫查平 检测到回波幅值后再执行下一个坐标检测 [8] 。
面指令,单片机每发送一个步进长度指令给对应轴 2.2.5 下位机程序设计
电机后马上通过串口发送当前位置标识符,如图 8
单片机与上位机 (LabVIEW) 端以异步串行方
所示,上位机接收标识符后统计当前标识符个数并 式通信,字符帧采用无奇偶校验位的10位数据帧格
进行分析,统计目前换能器所在的行列位置。举例 式,以9600 bit/s速率传送数据,单片机端接收上位
如下,当上位机统计到标识符个数为 660 时,按上 机字符串并解析为具体执行指令。图9 为单片机主
面扫查平面设置,其当前平面坐标行为 660/160=4 函数程序结构图,图 10 为单片机中断函数结构图,
(求商);列为 660%160 = 20 (求余)。即待检平面坐 中断函数不断监控上位机是否发送字符指令,由
标为(4, 20)。解释完坐标后再通过DLL采集当前小 于单片机接收到的是 ASCII 码字符串,需要先调用
球反射声压幅值。所采集到的回波幅值逐个填充平 compile( ) 子函数将字符串解析为对应数值并以一