
Page 95 - 《应用声学》2021年第5期
P. 95
第 40 卷 第 5 期 李宏琳等: 温盐深剖面仪与 Argo 数据的冬季印度洋声速剖面分析 739
0 引言 处理。主要数据处理过程包括数据转换、修正电导
率、去除由于船只的起伏造成的数据“打结” 以及利
随着海洋声学的发展,人们越来越认识到研究
用电导率、温度、压力来计算盐度和温度等,最终
海洋中声速对于水下目标探测和水声通信具有重
根据实验需要将 17个站位的 CTD 数据在深度上按
要意义。海洋的声速结构对水声传播有非常重要的
1 m 进行等间距插值并按.asc 格式输出,便于后续
影响,海水的声速随温度、盐度以及静压力在不断 处理。
变化,难以用解析表达式来表示它们之间的关系,通
14°30'S
常用经验公式来表示它们之间的关系 [1] 。 7 7 6 6 4 4 3 3 2 2 1 1
在声学中,可以使用直接法和间接法来获取
15°30'S
所需要的水中声速剖面。直接法简单,但是有时只
10
12
能获得某些深度上的声速。间接法能够获得大面 㓜ᓖ 8 8 9 9 10 5 5 11 12
积范围的声速,但是计算量大,理论基础复杂 [2] 。 16°30'S
17 17
除上述测量法外,还有应用较广泛的声速重构法, 16 16 15 15 14 14 13 13
它只要测量少量若干个点的声速数据即可重构全 17°30'S
85°30'E 86°30'E 87°30'E 88°30'E 89°30'E 90°30'E
海深的声速剖面。声速重构最大的优势就是不必 ፃए
进行声场计算,计算量极小 [3] ,但是很难找出与
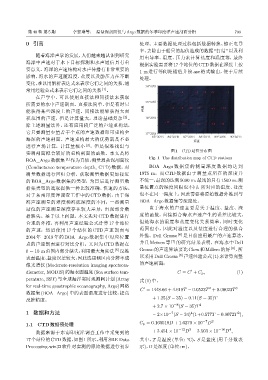
图 1 CTD 站位分布图
实测剖面拟合较好的重构剖面的函数。本文是将
Fig. 1 The distribution map of CTD stations
BOA_Argo数据集 [4] 作为真值,测量温盐深剖面仪
(Conductance temperature depth, CTD) 数据,对 BOA_Argo 数据集的测量深度数据均达到
测量数据进行回归分析,获取测量数据更加接近 1975 m,而 CTD 数据由于测量点所在的深度并
的 BOA_Argo 数据集的类型,为日后进行测量数 不统一,最深的达到5000 m,最浅的只有1500 m,测
据集类型的选取提供一种比较准确、快速的方法。 量位置点的深度间隔也不同,所对应的温度、盐度
对于东南印度洋调查工作中的 CTD 数据,由于深 也不在同一深度上,因此需要将原始数据外推到与
海声速测量的难度和海底深度的不同,一些测量 BOA_Argo数据集等深度处。
站位的声速测量深度存在较大差异,出现部分数 由于海水的声速主要是关于温度、盐度、深
据缺失。基于以上问题,本文先对 CTD 数据进行 度的函数,直接拟合海水声速产生的误差比较大,
合理的外推,再利用声速经验公式计算 17 个站位 但是海水的温度和盐度变化关系简单,同时变化
的声速,然后使用 17 个站位的 CTD 声速剖面与 范围也小,因此对温度以及盐度进行合理的拟合
2004 年 –2019 年的 BOA_Argo 数据集中对应位置 外推。Dell Grosso [6] 是目前应用最广的声速算法,
点的声速剖面进行对比分析。又因为 CTD 数据在 并且 Meinen 等 [7] 的研究结果表明,在海水中 Dell
0 ∼ 10 m范围内部分缺失,利用最大角度法 [5] 反推 Grosso 的声速算法要比 Chen 和 Millero 的好 [8] ,所
表面温度、盐度误差较大,因此选用测区内分辨率成 以采用Dell Grosso [6] 声速经验公式(1)来计算完整
像光谱仪 (Moderate-resolution imaging spectrora- 的声速剖面:
′
diometer, MODIS)的海表面温度(Sea surface tem- C = C + C p , (1)
perature, SST) 与全球海洋实时观测网计划 (Array 式(1)中,
for real-time geostrophic oceanography, Argo)网格
2
′
C = 1448.66 + 4.618T − 0.0523T + 0.00023T 3
数据集 (BOA_Argo) 中的表面温度进行比较,提高
反推精度。 + 1.25(S − 35) − 0.11(S − 35)T
+ 2.7 × 10 −8 (S − 35)T 4
1 数据和方法 − 2×10 −7 (S − 34) (1+0.577T − 0.0072T ),
4
2
1.1 CTD数据预处理 C p = 0.160518D + 1.0279 × 10 −7 D 2
4
3
数据来源于东南印度洋调查工作中采集到的 + 3.451 × 10 −12 D − 3.503 × 10 −16 D ,
17个站位的CTD数据,如图1所示,利用SBE Data 其中,T 是温度 (单位:C),S 是盐度 (用千分数表
◦
Processing-win32 软件对实测的原始数据进行初步 示),D 是深度(单位:m)。