
Page 104 - 《应用声学》2021年第6期
P. 104
900 2021 年 11 月
实验中,首先对比有无刚性球时两个误差传声 环境的反射。
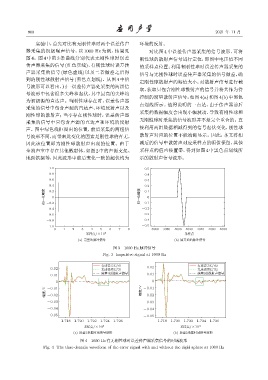
器采集的初级噪声信号,以 1000 Hz 为例,结果见 对比图 4 中误差传声器采集的信号波形,可将
图 4。图 4 中的 3 条曲线分别代表无刚性球时误差 刚性球的散射声信号进行定位,即图中电压值不同
传声器采集的信号 (红色实线)、有刚性球时误差传 的采样点位置;利用有刚性球时误差传声器采集的
声器采集的信号 (绿色虚线) 以及二者做差之后得 信号与无刚性球时误差传声器采集的信号做差,确
到的刚性球散射声信号 (黑色点划线)。从图 4 中信
定刚性球散射声的幅值大小;对散射声信号进行截
号波形可以看出,同一误差传声器处采集的两组信
取,获取只包含刚性球散射声的信号并将其作为待
号波形中包含很多尖峰和起伏,其中最高的尖峰均
控制的期望散射声信号,如图 4(a) 和图 4(b) 中黑色
为初级源的直达声。当刚性球存在时,误差传声器
点划线所示。值得说明的一点是,由于传声器前后
采集的信号中包含声源的直达声、环境反射声以及
采集的数据幅度会出现小幅波动,导致有刚性球和
刚性球的散射声;当不存在刚性球时,误差传声器
无刚性球时采集的信号波形并不是完全重合的。直
采集的信号中只包含声源的直达声和环境的反射
声。图中绿色线框圈出的位置,前后采集的两组信 接利用两组数据相减得到的信号起伏变化,刚性球
号波形不同,而带来此变化的因素是刚性球的有无, 散射声对应的位置不能清晰显示。因此,本文将相
因此该位置即为刚性球散射声出现的位置。由于 减后的信号中散射声对应采样点的幅值保留,其他
全消声室中存在其他散射体,如图 2 中的声源支架、 采样点的值直接置零,得到如图 4 中黑色点划线所
地面铁架等,因此波形中前后变化一致的起伏均为 示的散射声信号波形。
1.0 0.5
0.8 0.4
0.6 0.3
0.4 0.2
ॆʷӑࣨए -0.2 0 ॆʷӑࣨए -0.1 0
0.2
0.1
-0.4 -0.2
-0.6 -0.3
-0.8 -0.4
-1.0 -0.5
0 1 2 3 4 5 6 7 8 3960 3980 4000 4020 4040 4060 4080
᧔ನག/T10 4 ᧔ನག
(a) ߹டᄊᑢфηՂ (b) ࡙नՑᄊᑢфηՂ
图 3 1000 Hz 脉冲信号
Fig. 3 Impulsive signal at 1000 Hz
దုឨࣀηՂ దုឨࣀηՂ
0.02 ုឨࣀηՂ 0.02 ုឨࣀηՂ
ឨࣀ ܫங࠱ܦηՂ ឨࣀ ܫங࠱ܦηՂ
0.01 0.01
0 0
ࣨए/V -0.01 ࣨए/V -0.01
-0.02
-0.02
-0.03 -0.03
-0.04 -0.04
-0.05 -0.05
1.718 1.720 1.722 1.724 1.726 1.718 1.720 1.722 1.724 1.726
᧔ನག/T10 4 ᧔ನག/T10 4
(a) ឨࣀ1᧔ᬷ۫ηՂฉॎ (b) ឨࣀ2᧔ᬷ۫ηՂฉॎ
图 4 1000 Hz 有无刚性球时误差传声器采集信号的时域波形
Fig. 4 The time-domain waveform of the error signal with and without the rigid sphere at 1000 Hz