
Page 105 - 《应用声学》2021年第6期
P. 105
第 40 卷 第 6 期 王冉等: 基于脉冲声分离的刚性球散射声控制 901
获取到期望散射声信号后,利用第 1 节中公 的信号幅度对比可以看出,二者基本相同,即实现了
式 (6) 进行滤波器设计,以实现刚性球散射声降 刚性球散射体的 “声学不可见”。此外,800 Hz 以及
噪控制并在 DSP 实验平台上进行实验验证。同时, 900 Hz 的实验结论亦与上述结论相同,本文将不再
在求解控制系数时采用正则化方法以保证算法的 单独给出其实验结果。
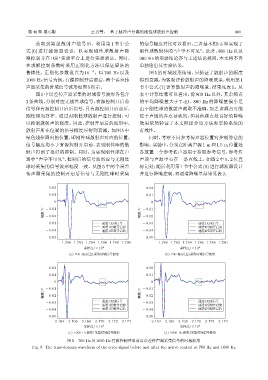
鲁棒性,正则化参数设置为 10 −4 。以 700 Hz 以及 图 5 的时域波形结果,只验证了散射声的幅度
1000 Hz 信号为例,有源控制开启前后,两个误差传 得到衰减,为客观评价散射声的降噪效果,利用第 1
声器采集的时域信号波形如图5所示。 节中公式 (7) 计算散射声的降噪量,结果见表 1。从
图5 中误差传声器采集的时域信号波形各包含 表中计算结果可以看出,除 800 Hz 以外,其余频点
3 条曲线,分别对应无刚性球信号、有源控制开启前 的平均降噪量大于 7 dB。800 Hz 的降噪量偏小是
信号和有源控制开启后信号,且有源控制开启前后, 由于刚性球的散射声截取不准确,加之该频点可能
刚性球均存在。通过对刚性球散射声进行控制,可 位于声场的谷点导致的,但其他频点处良好的降噪
以抑制散射声的强度。因此,控制开启后的波形中, 效果依然验证了本文所提分离方法和实验系统的
散射声所在位置的信号幅度应得到衰减。如图 5 中 有效性。
绿色线框圈出的位置,即刚性球散射声对应的位置, 同时,考察不同参考传声器位置对控制算法的
信号幅度均小于有源控制开启前,表明刚性球的散 影响。实验中,分别在距离声源1 m和1.5 m位置处
射声得到了很好的抑制。同时,为实现刚性球在声 各放置一个参考传声器用于拾取参考信号,参考传
场中 “声学不可见”,控制后的信号波形应与无刚性 声器与声源中心在一条直线上,如图 2 中 1、2 位置
球时采集的信号波形幅度一致。从图 5 中两个误差 标记处;随后利用第1 节中公式 (6)进行滤波器设计
传声器采集的控制开启后信号与无刚性球时采集 并进行降噪控制,双通道降噪量结果见表2。
0.02 0.02
0.01 0.01
0 0
ࣨए/V -0.01 ࣨए/V -0.01
-0.02
-0.02
-0.03 ᤰ᥋1ုηՂ -0.03 ᤰ᥋2ုηՂ
ᤰ᥋1҄नթҒ ᤰ᥋2҄नթҒ
-0.04 ᤰ᥋1҄नթՑ -0.04 ᤰ᥋2҄नթՑ
-0.05 -0.05
1.780 1.782 1.784 1.786 1.788 1.790 1.780 1.782 1.784 1.786 1.788 1.790
᧔ನག/T10 4 ᧔ನག/T10 4
(a) 700 Hzឨࣀ1᧔ᬷ۫ηՂฉॎ (b) 700 Hzឨࣀ2᧔ᬷ۫ηՂฉॎ
0.02 0.02
0.01 0.01
0 0
ࣨए/V -0.01 ࣨए/V -0.01
-0.02
-0.02
-0.03 ᤰ᥋1ုηՂ -0.03 ᤰ᥋2ုηՂ
ᤰ᥋1҄नթҒ ᤰ᥋2҄नթҒ
-0.04 ᤰ᥋1҄नթՑ -0.04 ᤰ᥋2҄नթՑ
-0.05 -0.05
2.164 2.166 2.168 2.170 2.172 2.174 2.164 2.166 2.168 2.170 2.172 2.174
᧔ನག/T10 4 ᧔ನག/T10 4
(c) 1000 Hzឨࣀ1᧔ᬷ۫ηՂฉॎ (d) 1000 Hzឨࣀ2᧔ᬷ۫ηՂฉॎ
图 5 700 Hz 及 1000 Hz 有源控制开启前后误差传声器采集信号的时域波形
Fig. 5 The time-domain waveform of the error signal before and after the active control at 700 Hz and 1000 Hz