
Page 76 - 《应用声学》2022年第1期
P. 76
72 2022 年 1 月
的EGF信噪比增加”准则确定,即 10 s (如对于两个小时噪声数据,则每条阵列上每个
阵元可以产生 720 段的噪声信号)。接着根据第 1.1
1, SNR k,l+1 > SNR k,l ,
w k,l = (4) 节空域滤波方法,将两个阵列的波束输出做互相关,
0, SNR k,l+1 < SNR k,l ,
共得到 720 段互相关输出。将各段互相关输出编号
式 (4) 中,SNR k,l 与 SNR k,l+1 分别表示将 y k,l (ω) 累 为 l = 1, · · · , L,则每一段被称为一个快拍的频域
积前后反傅里叶变换得到的第 k 子带 EGF 的信噪 NCF。算法处理中,每一快拍 NCF 在频域等间隔划
比。本文沿用文献[9]中对EGF信噪比的定义,即预 分为10个子带,子带带宽为38 Hz。
期相干峰值到达时间段内的包络最大值与剩余时
间残余波动的水平之比,其中剩余时间波动的水平
是从EGF在足够大的非预期到达时间段内(本文任
意选择为3 ∼ 10 s)的标准差估计出来的。
SNR = TDs
max(abs(Hilbert(x(2.3 s<t<2.4 s)))) HLA 2
20 lg , (5) θ 0
std(x(3 s < t < 10 s)) HLA 1
式 (5) 中,2.3 ∼ 2.4 s 为 EGF 预期相干峰值出现的
区间,3 ∼ 10 s 为残余扰动存在的一段区间,操作 (a) ࠄᰎ࣋ஊᇨਓڏ
符 Hilbert(·) 与 std(·) 分别表示对信号求希尔伯特 0
变换以及标准差。根据干涉原理,如果两个 NCF 之
20
间是相干的,那么两者累积后信噪比必然增加 [17] 。
因此 EGF 信噪比增加准则的目的是保证加入累积 40
过程的NCF之间是相干的。 ງए/m 60
将式 (3) 中各子带的累积结果谱白化后在频域
拼接, 80
[Y 1 (ω), Y 2 (ω), · · · , Y K (ω)]
Y (ω) = , (6)
[|Y 1 (ω)| , |Y 2 (ω)| , · · · , |Y K (ω)|] 1525 1530 1535 1540 1545
ܦᤴ/(m·s -1 )
式 (6) 中,谱白化的作用是防止某个频段信号能量 (b) ๒ඵܦᤴҖ᭧
过强引起时域 EGF 波形畸变。对Y (ω) 进行反傅里
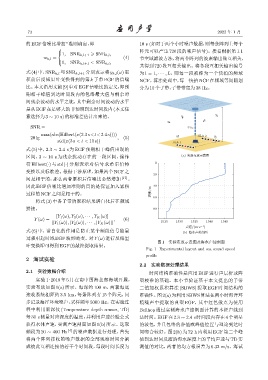
图 1 实验布放示意图及海水声速剖面
叶变换即可得到EGF的最终提取结果。
Fig. 1 Experimental layout and sea sound speed
profile
2 海试实验
2.2 实验数据处理结果
2.1 实验数据介绍 时间结构准确性是应用 EGF 进行声层析或阵
实验于 2018 年 5 月在南中国海北部海域开展, 型校准的基础。本小节验证基于本文提出的子带
实验布放如图 1(a) 所示。海深约 100 m,两套海底 二值加权累积算法 (SBWS) 提取 EGF 时间结构的
接收系统相距约 3.5 km,每条阵列有 15 个阵元,同 准确性。图2(a)为利用SBWS算法在两小时海洋环
步记录海洋环境噪声,采样频率5000 Hz。在实验过 境噪声中提取的典型 EGF,其中红色散点为使用
程中利用温深仪 (Temperature depth sensor, TD) Bellhop 通过实测海水声速剖面计算的本征声线到
每 30 s 测量对应深度的温度,并利用声速经验公式 达时间。EGF在2.3 ∼ 2.4 s 时间段内存在 4 个明显
获得水体声速,实测声速剖面如图 1(b) 所示。选取 的波包,并且包络的谷值或峰值位置与理论到达时
频段为 20 ∼ 400 Hz [4] 的噪声数据进行处理,首先 间吻合较好。图 2(b) 为 72 h 内利用 EGF 第二个峰
将两个阵列接收的噪声数据的全部观察时间分割 值到达时间反演的海水深度上的平均声速与TD 实
成彼此互相连接的若干个时间段,每段时间长度为 测值的对比,两者的均方根误差为 0.32 m/s。海试