
Page 154 - 《应该声学》2022年第2期
P. 154
322 2022 年 3 月
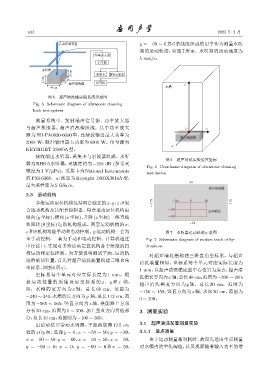
ᤂү҄ᜉᎶ y = −60 ∼ 0 共 6 条线段组成的田字作为测量水听
ᤂ
器的运动轨迹,如图 7 所示。水听器的运动速度为
Ҫဋஊܸ٨
5 mm/s。
ηՂູ
ඵզ٨
20 cm ᧔ᬷӵ ߚᇨฉ٨
25 cm 30 cm ᡔܦຍฤയ ᝠካ
40 cm ඵയ z
图 5 超声清洗槽实验系统示意图
Fig. 5 Schematic diagram of ultrasonic cleaning
bath test system
测量系统中,发射端由信号源、功率放大器
与超声换能器、超声清洗槽组成。其中功率放大 O x
器为 HD-PA0830-6000 型,连续波输出最大功率为
ᡔܦ૱ᑟ٨
2000 W,脉冲输出最大功率为 6000 W。信号源为
y
KEYSIGHT 33600A型。
接收端由水听器、采集卡与示波器组成。水听
图 6 超声清洗实验装置坐标
器为 RHS-5 水听器,灵敏度约为 −218 dB (参考灵
Fig. 6 Coordinate diagram of ultrasonic cleaning
敏度为 1 V/µPa)。采集卡为 National Instruments
test device
的 PXI-6368。示波器为 Keysight DSOX3014A 型,
85
最大采样率为5 GSa/s。
ᡔܦ૱ᑟ٨
2.3 运动机构
-175
多维运动定位机构包括两套独立的x、y、z、θ 复 -50 0 50 175
合运动机构及其配套控制器。每套运动定位机构由 -30 ᤂүय़
纵向(y 坐标)、横向(x坐标)、升降(z 坐标)三维直线 -60
和回转 (θ 坐标) 运动机构组成。两套运动机构的 x、 -85
z 和θ 机构均能手动和电动控制。y 运动机构一套为 图 7 水听器运动轨迹示意图
全手动控制,一套为手动和电动控制。计算机通过 Fig. 7 Schematic diagram of motion track of hy-
串行接口,实现对多维运动定位机构各个维度的扫 drophone
描运动和定位控制。为方便说明测试平面、运动轨
对超声清洗槽构建三维直角坐标系,与超声
迹的确切位置,首先对超声清洗装置构建三维直角
清洗装置相似,坐标系每个单元对应实际长度为
坐标系,如图6所示。
1 mm,以超声清洗槽底面中心位置为原点,超声清
坐标系每个单元对应实际长度为 1 mm。根
洗槽长方向为x轴,总长40 cm,范围为−200 ∼ 200;
据运动装置的原始设定坐标系的 x、y 和 z 轴,
超声清洗槽宽方向为 y 轴,总长 30 cm,范围为
即:水槽的宽方向为 x 轴,总长 68 cm,范围为
−150 ∼ 150;竖直方向为 z 轴,水深 20 cm,范围为
−340 ∼ 340;水槽的长方向为y 轴,总长 113 cm,范
0 ∼ 200。
围为 −565 ∼ 565;竖直方向为 z 轴,换能器上方部
分长 30 cm,范围为 0 ∼ 300,加上竖直方向其他部 3 测量实验
分,总长40 cm,范围则为−100 ∼ 300。
由运动装置带动水听器,于距换能器 12.5 cm 3.1 超声清洗装置测量实验
处的 xOy 面,选择 y = 0,x = −50 ∼ 50;y = −30, 3.1.1 单点测量
x = −50 ∼ 50;y = −60,x = −50 ∼ 50;x = −50, 由于运动测量相对耗时,故而先选用单点测量
y = −60 ∼ 0;x = 0,y = −60 ∼ 0 和 x = 50, 对水槽内的空化阈值,以及观察随着输入功率的增