
Page 146 - 《应用声学》2022年第3期
P. 146
468 2022 年 5 月
1.5 模型的拟合情况较好,能适应水下目标分类的小样
ஈᤉMobilenetV2+ܦڏ
ஈᤉMobilenetV2+Аڏ 本数据。本文提出的融合分类网络对水下目标图
ܦАᚸՌᎪፏ 像的分类准确率达到 96.5%,相比融合前的网络模
1.0 型对声学图像和光学图像的分类准确率分别提高
юᆸဋ 8.6%和3.4%,具有良好的分类性能。
0.5
4.3 不同融合方式下网络性能比较
本文在对声光图像进行融合时使用的算法是
0 通道拼接 (concatenate),在网络的深层位置进行
0 20 40 60 80 100
ᤖ̽ 特征融合。除此之外,融合算法还包括直接叠加
(a) ˀՏѬዝവیᄊ͉̽Ѧ
(add)、最大化运算 (maximum) 等,融合位置也可
1.0
以选在网络的浅层部分。分别使用add、maximum、
0.9
concatenate三种融合算法,在改进MobileNetV2网
0.8
络的第一个卷积层后进行特征融合,将该融合网络
юᆸဋ 0.7 记为浅层融合网络,本文提出的融合网络记为深层
0.6
融合网络,利用声、光学图像分别在两种融合网络
0.5 ஈᤉMobilenetV2+ܦڏ 上进行实验,训练过程代价函数及准确率的变化如
ஈᤉMobilenetV2+Аڏ
0.4 ܦАᚸՌᎪፏ 图9所示。
0.3 两种融合网络在不同的融合算法下代价函数
0 20 40 60 80 100
ᤖ̽ 值均下降并收敛,融合算法的选择对网络性能的影
(b) ˀՏѬዝവیᄊѬዝюᆸဋ
响不明显,深层融合网络的收敛速率更快。将测试
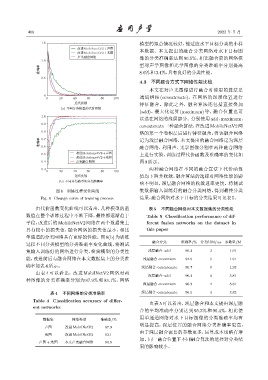
图 8 训练过程变化曲线 集数据输入训练好的融合分类网络,得到最终分类
Fig. 8 Change curve of training process 结果,融合网络对水下目标的分类结果可见表5。
由代价函数变化曲线可以看出,几种模型的函 表 5 不同融合网络对本文数据集的分类性能
数值在整个训练过程中不断下降,最终都逐渐趋于 Table 5 Classification performance of dif-
平稳,改进后的 MobileNetV2 网络在两个数据集上 ferent fusion networks on the dataset in
具有较小的损失值,融合网络的损失值最小,相比 this paper
单通道的分类网络具有更好的性能。图8(b)为训练
融合方式 准确率/% 分类时间/ms 参数量/M
过程不同分类模型的分类准确率变化曲线,将测试
集输入训练好的网络进行分类,检验模型的分类性 浅层融合 -add 95.4 3 1.91
能,改进前后与融合网络在本文数据集上的分类准 浅层融合 -maximum 94.9 3 1.91
确率如表4所示。 浅层融合 -concatenate 95.7 3 1.92
由表 4 可以看出,改进 MobilNetV2 网络对两
深层融合 -add 96.4 4 3.81
种图像的分类准确率分别为 87.9% 和 93.1%,网络
深层融合 -maximum 96.3 4 3.81
表 4 不同网络的分类准确率 深层融合 -concatenate 96.5 4 3.82
Table 4 Classification accuracy of differ-
由表 5 可以看出,浅层融合和本文提出深层融
ent networks
合的平均准确率分别达到 95.3% 和 96.4%,相比使
用单通道网络对水下目标图像的分类准确率均有
数据集 网络类型 准确率/%
明显提高,深层位置的融合网络分类准确率更高。
声图 改进 MobilNetV2 87.9
由于深层融合需要的参数更多,运算成本也略有增
光图 改进 MobilNetV2 93.1
加。同一融合位置下不同融合算法的选择对分类结
声图 + 光图 本文声光融合网络 96.5
果的影响较小。