
Page 147 - 《应用声学》2022年第3期
P. 147
第 41 卷 第 3 期 巩文静等: 基于改进 MobilenetV2 网络的声光图像融合水下目标分类方法 469
1.5 1.5
ูࡏᚸՌ-add ງࡏᚸՌ-add
ูࡏᚸՌ-maximum ງࡏᚸՌ-maximum
1.0 ูࡏᚸՌ-concatenate 1.0 ງࡏᚸՌ-concatenate
͉̽Ѧϙ ͉̽Ѧϙ
0.5 0.5
0 0
0 20 40 60 80 100 0 20 40 60 80 100
ᤖ̽ ᤖ̽
(a) ูࡏᚸՌᎪፏᄊ͉̽Ѧ (b) ງࡏᚸՌᎪፏᄊ͉̽Ѧ
1.0 1.0
0.8 0.8
юᆸဋ юᆸဋ
0.6 0.6
ูࡏᚸՌ-add ງࡏᚸՌ-add
ูࡏᚸՌ-maximum ງࡏᚸՌ-maximum
0.4 ูࡏᚸՌ-concatenate 0.4 ງࡏᚸՌ-concatenate
0 20 40 60 80 100 0 20 40 60 80 100
ᤖ̽ ᤖ̽
(c) ูࡏᚸՌᎪፏᄊѬዝюᆸဋ (d) ງࡏᚸՌᎪፏᄊѬዝюᆸဋ
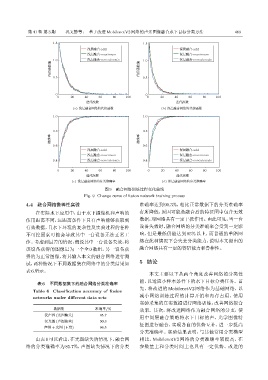
图 9 融合网络训练过程变化曲线
Fig. 9 Change curve of fusion network training process
4.4 融合网络鲁棒性实验 准确率达到 90.3%,相比正常数据下的分类准确率
在实际水下应用中,由于水下摄像机和声呐的 有所降低,原因可能是融合后的特征图中包含无效
作用距离不同,远距离条件下只有声呐能够获取到 数据,对网络具有一定干扰作用。由此可见,当一台
有效数据,且水下环境的复杂性及实验过程的各种 设备失效时,融合网络的分类准确率会受到一定影
不可控因素可能会导致其中一台设备无法正常工 响,但是最低仍能达到 85% 以上,而普通的单路网
作。考虑到最差的情况,假设其中一台设备失效,将 络在此种情况下会失去分类能力,说明本文提出的
该设备获得的图像记为一个全 0 数组,另一设备获 融合网络具有一定的容错能力和鲁棒性。
得的为正常图像,将其输入本文的融合网络进行测
5 结论
试,两种情况下不同数据集在网络中的分类结果如
表6所示。
本文主要以下从两个角度改善网络的分类性
能,以适应小样本条件下的水下目标分类任务。首
表 6 不同数据集下的融合网络分类准确率
先,将改进的 MobilenetV2 网络作为基础网络,以
Table 6 Classification accuracy of fusion
减小网络训练过程的计算开销和内存占用,使用
networks under different data sets
实验采集的真实数据进行网络训练,改善网络拟合
数据集 准确率/% 效果。其次,将改进网络作为融合网络的分支,使
仅声图 (光图缺失) 85.7
用中间层融合策略将水下目标的声、光学图像特
仅光图 (声图缺失) 90.3
征图进行融合,实现各自的优势互补,进一步提高
声图 + 光图 (正常) 96.5
分类准确率。实验结果表明,与其他常用分类模型
由表 6可以看出,在光图缺失的情况下,融合网 相比,MobilenetV2 网络的分类准确率较提高,在
络的分类准确率为 85.7%,声图缺失情况下的分类 参数量上和分类时间上也具有一定优势。改进的