
Page 31 - 《应用声学》2022年第3期
P. 31
第 41 卷 第 3 期 杨星瑶等: 面向传递路径分析方法研究的实验系统设计 353
忽略吊耳的情况下,机体整体沿 z 方向最大高度为 传感系统 3 部分。在系统工作前,首先需要进行发
200 mm,沿y 方向最大长度为 380 mm,沿x方向最 动机信号采集实验,本文拟采集某直列四缸四冲程
大宽度为180 mm。 汽油机在加速工况下的各缸缸压信号及机体表面
振动信号。
z y y
x
ԧүηՂ
᧔ᬷតᰎ
༏ҵ ҄ጇፒ ԼᜉᎶ
ऐ
ηՂ
֑̾
ᝠካ ηՂԧၷ٨ Ҫဋஊܸ٨ ༏٨
ԧүᓎ ηՂ
ᰂᓎ
͜ਖጇፒ
图 2 简化车身结构示意图 ҫᤴए
Fig. 2 Scheme of simplified body ηՂ ҫᤴए͜ਖ٨
᧔ᬷ ᢼᢶ ২Ꮆ ʹ
ᜉᎶ ܦԍ
Վ ηՂ ͜ܦ٨
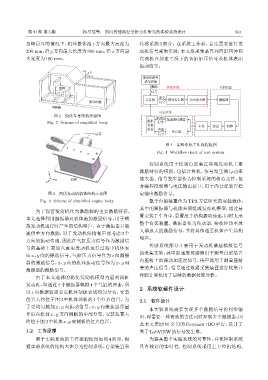
图 4 实验系统工作流程框图
Fig. 4 Workflow chart of test system
控制系统用于控制台架装置实现发动机主要
z 激励特征的模拟,包括计算机、信号发生器与功率
y ʹ 放大器。信号发生器作为控制系统的核心元件,包
x
含编程控制器与电压输出接口,用于向台架装置稳
图 3 简化发动机机体结构示意图 定输出激励信号。
Fig. 3 Scheme of simplified engine body 整个台架装置作为 TPA 方法研究的实验载体,
其中的激振器与机体共同组成发动机模型,通过悬
为了保留发动机作为激励源的主要激励特征,
置安装于车身中,悬置用于结构振动传递,同时支承
本文选择利用激振器对机体施加激励信号,用于模
整个台架装置。激振器作为作动器,接收经功率放
拟发动机运行时产生的结构噪声。由于激振器只能
大器放大的激励信号,并将其传递至机体产生结构
提供单方向激励,对于发动机结构噪声需考虑 3 个
噪声。
方向的振动传递,因此在气缸压力信号作为激励信
传感系统部分主要用于发动机激励模拟信号
号的基础上需加入真实发动机运行过程中机体表
的采集实验,其中加速度传感器用于测量台架装置
面 x、y 向的振动信号,气缸压力信号作为 z 向激振
内座椅上的振动加速度信号,传声器用于测量座椅
器的激励信号,x、y 向的机体振动信号作为 x、y 向
旁的声压信号,信号通过数据采集装置进行收集并
激振器的激励信号。
传回计算机用于后续的数据处理分析。
由于本文选择的简化发动机模型为直列四缸
发动机,即通过 4 个激振器模拟 4 个气缸的冲击,所
2 系统软硬件设计
以 z 向激振器需要在机体顶板直线均匀分布,安装
位置大约位于图 3 中机体顶板的 4 个红点位置。为 2.1 软件设计
了更均匀施加 x、y 向振动信号,x、y 向激振器尽量
本实验系统需要实现多个激励信号的同步输
靠近在机体 x、y 方向侧板的中部分布,安装位置大
出,即需要一种有效的方法同时控制多个激振器,因
约位于图3中机体x、y 向侧板的红点位置。
此本文借助 NI 公司的 Compact RIO 平台,设计了
1.2 工作原理 基于LabVIEW的信号发生器。
整个实验系统的工作流程框图如图 4 所示,根 为提高整个实验系统的可靠性,并使控制系统
据实验系统的结构大体分为控制系统、台架装置和 具有较好的实时性,控制系统采用上下位机结构。