
Page 61 - 《应用声学》2022年第3期
P. 61
第 41 卷 第 3 期 张巧花等: 圆形阵列无线传感器的鸟鸣声检测方法 383
海岛及滨海湿地等栖息地中阵列无线传感器 特性,声信号进入接收窗时的各向一致性好,且对各
长期暴露在野外湿、热、盐、风、雨等环境下,既要 频点模态相对平滑,有利于传声器阵列更好地拾取
对拾声传感器进行有效保护,又不能影响对声音的 鸣声信号及后处理。
拾取。为了适应野外环境,传感器的结构采用球形
刚性壳体设计,将硬件电路和数字式传声器阵列密 20 n/
n/
封在壳体中,有效防止硬件电路系统被海岛高盐和 10 n/
潮湿环境侵蚀及减少野外风、海浪等噪声干扰,保 0 n/
证电路长期稳定运行。在球形壳体结构中间留有高 b n↼kr↽ /dB -10
8 mm 的传声器拾声窗口,声音经过窗口到达传声 -20
器阵列时满足平面波要求。球体下方的方形密封电 -30
路仓内放置信号采集处理电路和控制通信电路,刚 -40
性球形结构如图1所示。 -50
10 -1 10 0 10 1
kr
1.2 球形结构的接收声场分析
(a) ᭤Ѹভု
刚性球形结构具有各向同性的特点,能够较好
20
地利用球谐域傅里叶变换对频率信号和空间信号
10
进行解耦,解决宽带相干信号定位问题,同时大大降
低结构声散射对鸟鸣声拾取的影响,为了分析刚性 0
球的声散射特性,将刚性球和非刚性球进行了对比。 b n ↼kr↽ /dB -10
所谓刚性球就是圆球表面为刚性表面,计算声场分 -20
n/
布时需考虑散射的影响,而非刚性球就是指虚拟球 -30 n/
n/
体,声波到达球体表面时无需考虑散射影响。假设 -40 n/
单位平面波从某个方向入射后,非刚性球和刚性球 -50 10 -1 10 0 10 1
情况下的模态强度函数b n (kr)满足 [16] kr
(b) Ѹভု
b n (kr) =
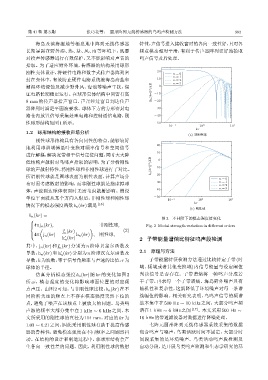
图 2 不同阶下的模态强度值变化
4πj n (kr), 非刚性球, Fig. 2 Modal strength variation in different orders
( ) (2)
′
j (kr)
n
4π j n (kr) −
h n (kr) , 刚性球,
h (kr) 2 子带能量谱熵比特征鸣声段检测
′
n
其中,j n (kr) 和 j (kr) 分别为 n 阶球贝塞尔函数及
′
n
导数,h n (kr) 和 h (kr) 分别为 n 阶球汉克尔函数及 2.1 原理与方法
′
n
导数,k 为波数,等于信号角频率与声速的比值,r 为 子带能量特征检测方法通过比较特定子带 (时
球体的半径。 域、频域或者其他变换域) 内信号能量与设定阈值
仿真分析模态强度 b n (kr) 随 kr 的变化如图 2 判决信号是否存在。子带谱熵将一帧鸣声分成若
所示,模态强度的变化将影响球面位置的对应频 干子带,再求每一个子带谱熵。海岛野外噪声具有
点声压。由图 2 可知,与非刚性球比较,b n (kr) 在不 随机性和复杂性,这就降低了环境噪声对每一条谱
同阶所关注的频点上不存在模态强度突然下拉的 线幅值的影响。相关研究表明,鸟鸣声信号的频谱
点,避免了噪声在该频点上被放大的问题。鸟类鸣 基本集中在 500 Hz ∼ 10 kHz 之间,大部分鸣声频
声源的频率大部分集中在 1 kHz ∼ 6 kHz 之间,本 谱在 1 kHz ∼ 6 kHz 之间 [17] 。本文采用 500 Hz ∼
文所采用的刚性球的直径为 114 mm,对应的 kr 为 10 kHz的带通滤波器对数据进行降噪处理。
1.03 ∼ 6.21 之间,因此采用刚性球有助于提高传感 七阵元圆形阵列无线传感器系统采集的数据
器的鲁棒性,避免模态强度在不同频率之间剧烈抖 包含鸣声与噪声,鸟类活跃时间不固定,大部分时
动。在结构的设计和制造过程中,非球形结构会产 间段采集的是环境噪声。鸟类活动鸣声段检测及
生各向一致性差的问题。因此,利用刚性球的散射 自动分段,是开展鸟类鸣声监测和生态学研究的基