
Page 149 - 《应用声学》2023年第3期
P. 149
第 42 卷 第 3 期 张锦惠等: 有源降噪头靠中一种分布式虚拟传声器优化方法 587
其中,S m ∈ C P ×J 和 S v ∈ C Q×J 分别为次级声源
1 信号模型 至物理传声器与虚拟传声器处的传递函数矩阵。
在实际控制中,由于无法获得虚拟传声器采集
1.1 频域信号模型
到的信号,需要对虚拟传声器处的误差信号进行估
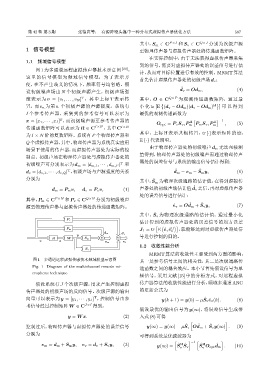
图 1 为多通道远程虚拟传声器技术示意图 [20] ,
计,从而对目标位置进行有效的控制。MRMT 算法
这里的信号模型为频域信号模型,为了表示方
首先估计虚拟传声器处的初级声场d v :
便,在不产生歧义的情况下,频率符号均省略。假
ˆ
设初级噪声场由 N 个初级声源产生,初级声场强 d v = Od m , (4)
T
度表示为 v = [v 1 , . . . , v N ] ,其中上标 T 表示转 其中,O ∈ C Q×P 为观测传递函数矩阵,通过最
[ { }]
置,而 v n 为第 n 个初级声源的声源强度。系统有 小 化 tr E (d v − Od m )(d v − Od m ) H 可 以 得 到
I 个参考传声器,采集到的参考信号可以表示为 最优的观测传递函数为
T
x = [x 1 , · · · , x I ] ,而初级噪声源至参考传声器的 H [ H ] −1
O opt = P v S vv P m P m S vv P m , (5)
传递函数矩阵可以表示为 R ∈ C I×N ,其中 C I×N
其中,上标 H 表示共轭转置,tr [·] 表示矩阵的迹,
为I × N 阶的复数矩阵。系统有P 个物理传声器和
E {·}代表期望。
Q个虚拟传声器,其中,物理传声器为系统真实应用
由于物理传声器处的初级噪声 d m 无法直接测
场景下使用的传声器,而虚拟传声器处为实际的控
量得到,物理传声器处的初级噪声需通过物理传声
制点。初级声场在物理传声器处与虚拟传声器处的
器处的误差信号与系统的输出信号估计得到:
T
初级噪声可分别表示为 d m = [d m,1 , · · · , d m,P ] 和
ˆ
ˆ
T
d v = [d v,1 , · · · , d v,Q ] ,初级声场与声源强度的关系 d m = e m − S m y, (6)
分别为
ˆ
其中,S m 为物理次级通路的估计值,在得到虚拟传
ˆ
d m = P m v, d v = P v v, (1) 声器处的初级声场估计值d v 之后,再对虚拟传声器
处的误差信号进行估计:
其中,P m ∈ C P ×N 和P v ∈ C Q×N 分别为初级噪声
ˆ
ˆ
源至物理传声器与虚拟传声器处的传递函数矩阵。 ˆ e v = Od m + S v y, (7)
ˆ
其中,S v 为物理次级通路的估计值,通过最小化
P v
估计得到的虚拟传声器处的误差信号的均方误差
[ ( H )]
J 1 = tr E ˆ e v ˆ e v
P m ,就能够达到对虚拟传声器处信
d m
y d v 号进行控制的目的。
R W S m S S
v x e m e v
1.2 收敛性能分析
S v
MRMT 算法的收敛性主要受到两方面的影响,
图 1 多通道远程虚拟传感技术频域模型示意图 其一是参考信号之间的相关性,其二是次级通路传
Fig. 1 Diagram of the multichannel remote mi-
递函数之间的耦合效应。本小节首先假设信号为单
crophone technique
频信号,采用文献 [15] 中的分析方式,对远程虚拟
假设系统有 J 个次级声源,用来产生控制虚拟 传声器算法的收敛性能进行分析,频域多通道ANC
传声器处的初级声场的反向信号。次级声源的输出 的更新公式为
T
向量可以表示为 y = [y 1 , · · · , y J ] ,控制信号由参 y(k + 1) = y(k) − µS v ˆ e v (k). (8)
ˆ
考信号经过控制矩阵W ∈ C J×I 得到:
假设最优的输出信号为 y(∞),将误差信号生成带
y = W x. (2) 入式(8)可得
[ ]
ˆ
ˆ
ˆ
控制过后,物理传声器与虚拟传声器处的误差信号 y(∞) = y(∞) − µS v Od m + S v y(∞) . (9)
分别为
可得到系统最优滤波器为
[ ] −1 [ ]
e m = d m + S m y, e v = d v + S v y, (3) ˆ H ˆ ˆ H ˆ (10)
y(∞) = S S v S O opt d m .
v
v