
Page 152 - 《应用声学》2023年第3期
P. 152
590 2023 年 5 月
⌣
s ⌣ v֒ s v֒
⌣
s ⌣ v֒ LMS s v֒
⇁
⌣ d m֒ ↼n↽
w ↼n↽ s ⌣m֒ ֓ S o S
֓ ⌣ e v֒ ↼n↽
y ↼n↽ s ⇁ o
x ↼n↽ ⌣ m֒ e m֒ ↼n↽
y ↼n↽ s ⌣ m֒ ⇁ e m֒ ↼n↽ o
֓
w ↼n↽ s ⌣ m֒ ֓ S o S
⌣ d m֒ ↼n↽ ⌣ e v֒↼n↽
s ⌣ v֒ LMS ⌣ s v֒ ⇁
s ⌣ v֒ ⌣ s v֒
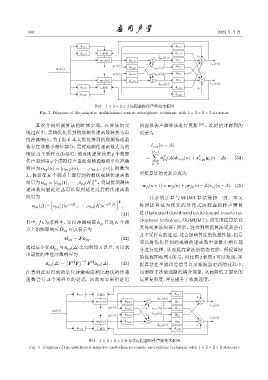
图 2 1 × 2 × 2 × 2 远程虚拟传声器技术框图
Fig. 2 Diagram of the adaptive multichannel remote microphone technique with 1 × 2 × 2 × 2 structure
其次介绍所提算法的时域实现。在算法的实 的虚拟传声器算法进行更新 [21] 。此时估计得到的
现过程中,需将优化得到的观测传递函数转换为单 误差为
位冲激响应,为了防止本文优化得到的观测传递函
数存在非最小相位部分,需对观测传递函数人为的 ˆ e v,q (n − ∆)
增加 ∆ 个采样点的延迟,假设所提算法第 p 个物理 P −1
∑
ˆ
T
v,qq q (n − ∆).
= ¯ o (∆)d m,q (n) + s T y (34)
传声器到第 q 个虚拟传声器处观测通路的单位冲激 pq
p=0
响应为 ¯ o pq (n) = [o pq,0 (n), · · · , o pq,L−1 (n)],阶数为
所提算法的更新公式为
L,假设在 K 个频点上面得到的最优观测传递函数
T
向量为 ¯ o pq = [¯o pq (1), · · · , ¯o pq (K)] 。将最优观测传
w ji (n + 1) = w ji (n) + µr jij (n − ∆)ˆe v,j (n − ∆). (35)
递函数向量延迟 ∆ 可以得到延迟过后的传递函数
向量为 其余的计算与 MRMT 算法保持一致。本文
[ ∆ ∆ ] T
¯ o pq (∆)= ¯o pq (1)e −j fs , · · · , ¯o pq (K)e −jK fs , 称所提算法为优化的分布式远程虚拟传声器算
(31) 法(Optimized distributed multichannel remote mi-
crophone technique, ODMRMT),该文所提算法以
其中,fs 为采样率,单位冲激响应 ¯ o pq 在这 K 个频
¯
点上的频率响应O pq 可以表示为 及传统算法如表 1 所示。注意到所提算法更新会有
∆个采样点的延迟,这会影响算法的收敛性能,但是
¯
O pq = F ¯ o pq . (32)
可以将优化得到的观测传递函数中非最小相位部
¯
通过最小化 O pq 与 ¯ o pq (∆) 之间的均方误差,可以求
分进行建模,从而提高算法的稳态性能。所提算法
出最优的单位冲激响应为
的流程图如图 3 所示,对比图 2 和图 3 可以发现,所
( H ) −1 H
¯ o pq (∆) = F F F ¯ o pq (∆). (33) 提算法在生成误差信号以及滤波器更新的过程中,
注意到此时得到的单位冲激响应相比最优的传递 均消除了次级通路的耦合现象,从而降低了算法的
函数会有 ∆ 个采样点的延迟,因此需要采用延迟 运算复杂度,并且提升了收敛速度。
s ⌣ v֒ LMS ⌣ s v֒
⌣ d m֒ ↼n↽ +
w ↼n↽ s ⌣m,11 - S o S
- ⌣ e v֒↼n↽
y ↼n↽ s ⌣ m,21 + e m֒ ↼n↽
x ↼n↽ o
e m֒ ↼n↽
y ↼n↽ s ⌣ m,21 + o
- ⌣ e v֒↼n↽
w ↼n↽ s ⌣ m,22 S S
- o
⌣ d m֒ ↼n↽ +
s ⌣ v֒ LMS ⌣ s v֒
图 3 1 × 2 × 2 × 2 分布式远程虚拟传声器技术框图
Fig. 3 Diagram of the distributed adaptive multichannel remote microphone technique with 1 × 2 × 2 × 2 structure