
Page 146 - 《应用声学》2023年第4期
P. 146
808 2023 年 7 月
H n 代表观测矩阵,K n 表示卡尔曼增益矩阵,ˆr n 表 由式 (7) 乘以式 (12) 减去式 (6) 乘以式 (13) 可
示 r n 的估计量,I 表示单位矩阵,Σ n 和 Γ n 分别是 得
过程噪声和观测噪声的协方差。
dρ(t)
利用 EKF 算法得到 α、β、γ、δ 和λ的估计值后, . (14)
dt
根据式 (9) 和式 (10) 可得到 a、b x 、b y 、sin(ξ x − ξ y )
和 cos(ξ x − ξ y ) 的值,进而可以求出正交项式 (6) 和 对 式 (14) 进 行 积 分 可 得 到 ρ(t), 传 统 的
式 (7)。 DCM 解调方法在积分之后的结果可以表示为
2
在通过第二步得到正交信号的值后,EKF- B J 1 (C)J 2 (C)φ s (t),在不考虑非线性因素干扰的情
DCM 方法的第三步是利用 DCM 方法解调出声信 况下,各系统参数均为固定值,因而除去参数 B 和
号φ s (t)。 C 的影响即可解调出声信号 φ s (t)。但在非线性因
记 ρ(t) = φ s (t) − ξ y ,在得到正交项式 (6) 和 素的影响下,DCM方法积分后得到的是φ s (t) − ξ y ,
式 (7) 两式后,可以依照传统 DCM 解调方法的思 需要消除 ξ y 的影响才能解调出声信号 φ s (t)。通常
路,对其分别求微分可得 情况下,各非线性因素变化十分缓慢,可将 ξ y 看
dρ(t)
cos ρ(t) , (12) 作一个低频量,因而可利用高通滤波消除 ξ y 的影
dt
响,得到声信号 φ s (t)。综上所述,本文中所提出的
dρ(t)
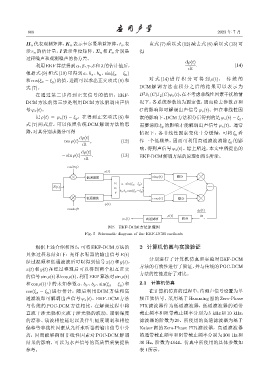
− sin ρ(t) . (13) EKF-DCM解调方法的原理如图5所示。
dt
cos2pft
x(t)
Ͱᤰฉ sinρ(t) ॲѬ
E a sin(ξ x-ξ y)
E(t) K
b x b y cos(ξ x -ξ y )
F
Ͱᤰฉ cosρ(t) ॲѬ
y(t)
cos4pft
d ρ(t)
ρ(t) dt
ϕ s (t) ᰴᤰฉ ሥѬ
图 5 EKF-DCM 方法原理图
Fig. 5 Schematic diagram of the EKF-DCM methods
根据上述介绍和图 5,可将 EKF-DCM 方法的 2 计算机仿真与实验验证
具体过程总结如下:光纤水听器的输出信号 E(t)
分别进行了计算机仿真和实验对 EKF-DCM
经过混频和低通滤波后可以得到信号 x(t) 和 y(t),
方法的有效性进行了验证,并与传统的 PGC-DCM
x(t) 和 y(t) 在经过整理后可以得到两个相互正交
方法的性能进行了对比。
的信号 sin ρ(t) 和 cos ρ(t),利用 EKF 算法对 sin ρ(t)
和 cos ρ(t) 中的未知参数 a、b x 、b y 、sin(ξ x − ξ y ) 和 2.1 计算机仿真
cos(ξ x − ξ y ) 进行估计,随后利用 DCM 方法和高 在计算机仿真的过程中,待测声信号设置为单
通滤波即可解调出声信号 φ s (t)。EKF-DCM 方法 频正弦信号,采用基于 Hamming 窗的 Zero-Phase
与传统的 PGC-DCM 方法相比,在解调过程中将 FIR 滤波器作为低通滤波器,低通滤波器的通带
直流干涉光强和交流干涉光强的波动、调制深度 截止频率和阻带截止频率分别为 5 kHz 和 10 kHz,
的漂移、载波相位延迟以及伴生幅度调制和相位 滤波器的阶数为 20。所使用的高通滤波器为基于
偏移等非线性因素从光纤水听器的输出信号中分 Kaiser 窗的 Zero-Phase FIR 滤波器,高通滤波器
离,因而能够抑制非线性因素对 PGC-DCM 解调 的通带截止频率和阻带截止频率分别为 300 Hz 和
结果的影响,可以为水声信号的高质量采集提供 30 Hz,阶数为 4644。仿真中所使用的具体参数如
参考。 表 1所示。