
Page 59 - 《应用声学)》2023年第5期
P. 59
第 42 卷 第 5 期 凌子超等: 多通道超声相控阵驱动控制系统设计 951
-15 V C5
PGND
PGND R384 R13 R14
PGND
C6
R19
4
C19
R23
3 LM7171AIM 7 8
-L 6 6 INN OUT 14
2 +L INP OUT 15
R25 OUT
R26 PGND PGND ADA_ON-1-8 4 ON* OUT 16 OUT
IN C24 3 OUT 17
R30 7 ADA_SD-1 SD*
2
C40 TFLA1 TFL
R31
JP3 ADA4870ARRZ
C38 15V C39
C41
PGND PGND C45 CH1_-20V
JP6
R33 R34
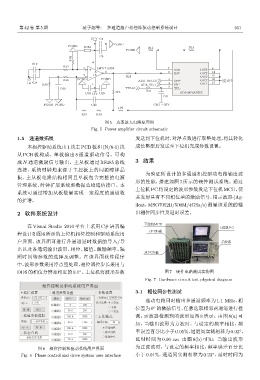
图 5 功率放大电路原理图
Fig. 5 Power amplifier circuit schematic
1.5 通道数拓展 发送到下位机时,对浮点数进行取整处理,将其转化
本相控驱动系统由1 块主PCB板和(N/8-1)块 成长整型后发送至下位机完成参数设置。
从 PCB 板构成,单板输出 8 通道驱动信号,可构
成 N 通道激励信号输出。主从板通过 RS485 总线 3 结果
连接,系统时钟均来源于主控板上的同源时钟晶
为验证所设计的多通道相控驱动电路输出波
振,主从板电路结构相同且单板包含完整的电源
形的性能,搭建如图 7 所示的硬件测试系统。通过
管理系统、时钟扩展系统和数据总线通信接口。本
上位机 PC 将设定的波形参数发送下位机 MCU,使
系统可通过增加从板数量实现一定程度的通道数
其发射具有不同相位差的激励信号,用示波器 (Ag-
的扩增。
ilent,MSO7052B/500M/4GSa/s) 测量该系统的输
2 软件系统设计 出相位同步性及延时误差。
在 Visual Studio 2010 平台上采用 C# 语言编 ʾͯMCU ʽͯPC
˟PCB
程设计如图 6 所示的上位机相位控制和驱动系统用
户界面,该界面可进行各通道延时数据的导入/导 ᇨฉ٨
出以及各通道输出波形、相位、幅值、激励频率、辐
̰PCB
照时间等参数的选择及调整。在该界面软件程序
中,波形参数采用浮点型处理,相位调控步长采用与
DDS的相位分辨率相近的0.1 。上位机将波形参数 图 7 硬件电路测试实物图
◦
Fig. 7 Hardware circuit test physical diagram
3.1 相位同步性测试
驱动电路同时输出多通道频率为 1.1 MHz、相
位差为 0 的激励信号,任意选取相邻两通道进行检
◦
测,示波器检测到的波形如图 8 所示。由图 8(a) 可
知,当输出波形为方波时,与设定的频率相比,频
率误差百分比小于0.05%,通道间实测相移为0.02 ,
◦
延时时间为 0.06 ns;由图 8(b) 可知,当输出波形
图 6 相位控制和驱动系统用户界面 为正弦波时,与设定的频率相比,频率误差百分比
◦
Fig. 6 Phase control and drive system user interface 小于 0.01%,通道间实测相移为 0.23 ,延时时间为